ロボット制御研究グループ
ロボットは人間よりも精度良く動くことができます。人間よりも大きな力を出すことだってできます。制御理論やモータ設計技術の向上により、ロボットが人間に代わって人間の苦手な仕事をやってくれる時代です。しかし、人間のように「状況を観察し、頭で考え、心で感じて、行動を起こす」といったことはまだまだ発展中です。ロボットは人間が設計したプログラムを忠実に実行するだけです。状況の観測手順や考え方は人間が設計しています。自らが「考え・感じる」ロボットはまだまだ将来の夢です。
このような夢の実現を目指していくにあたって、道木研究室では、「人間とロボットの共存」をテーマに研究を行っています。ロボットが周囲の状況と人の行動を認識し、その時々にあった動作を自分で考えて実行する、ということを目標にしています。現在は、行動認識、ロボットアーム、装着型アシストロボット、移動ロボットについての研究を行っています。
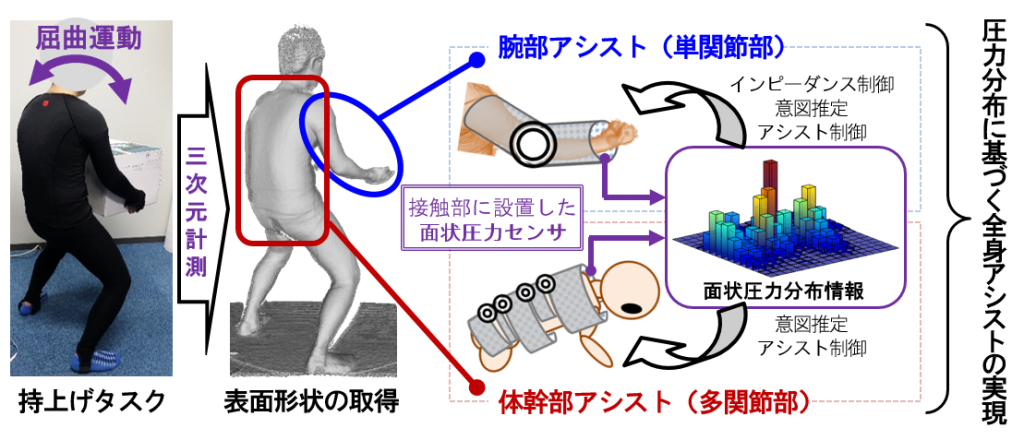
装着型アシストロボットのテーマは、人の背中などの複雑な関節の動きを助けることです。装着している人への安全性を保つために、ロボットと人体との接触面の圧力分布から、人が動こうとする意図を判断し、やさしくアシストする制御方法を研究しています。
また移動ロボットのテーマは、案内や警備に応用できるロボットの自律移動についてです。ロボットが周囲の状況を把握しながら安全に目的地に向かうために、カメラやレーザ、GPS等の複数のセンサの信号から信頼性の高い情報を判断して、制御に利用する方法を研究しています。
このようなテーマに対してシミュレーションや実験を繰り返しながら、よりよいロボットの制御方法を日々模索しています。

大学内でのドローン飛行実験

実験用移動ロボット

体幹部アシストのための多関節機構の試作機
面接触を直接考慮したアシスト機構のイメージ
テーマ一覧
- 自律移動ロボットの安定走行に向けた位置推定精度を考慮した経路計画
- 刺繍アクチュエータの応用に向けた基礎特性調査
- 衣服変形に伴う体表面刺激を活用した人工筋駆動型ハプティックスーツによる複合動作制御
- 歩行機能低下の予防を目指した常時着用可能な靴下型皮膚刺激デバイスの開発
過去テーマ一覧(過去3年分)
- 所望の変形となる布状アクチュエータの配向の設計
- 手指の操作技能伝達のためのロボットハンド-グローブシステムの提案
- 面状プレートと細径人工筋を併用した着衣型アシストスーツの開発
- 位置推定補助用UAV群を用いた作業用UAV位置推定システム
- 布状アクチュエータを用いた触感覚想起の研究
- 自律移動ロボットの安定した自律移動の実現
- 剛体フレームとソフトアクチュエータによるアシストスーツの開発
- インフラ設備外観点検に向けた計測計画
- 多様なロボットの協調による大規模構造物の外観データ収集システム