研究テーマ / Research topic
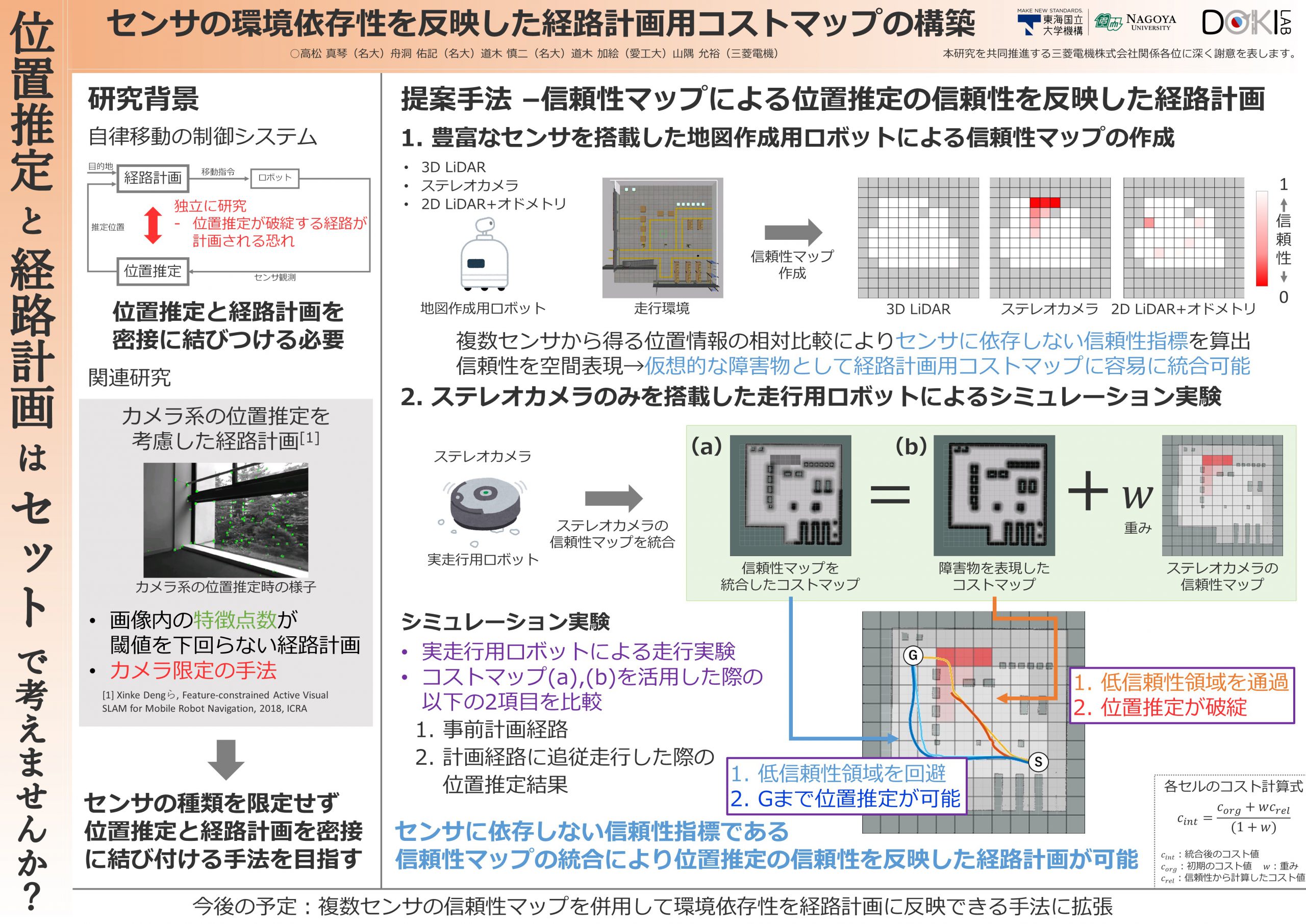
自律移動ロボットの安定した自律移動の実現
※転載禁止
<!–
| English ver. | Japanese ver. |
私は自律移動ロボットの自己位置推定について研究しています。
現在は先行研究[1]によって提案された「信頼性マップ」に基づくセンサ増設による自己位置推定のロバスト性の評価を行っております。
研究背景
自己位置推定とは
複数センサの選択的統合
詳しく見る
ロボット自身に搭載した複数センサの併用法として、先行研究[1]による複数センサの選択的統合法が提案されました。
先行研究では特性の異なる複数センサからそれぞれ異なる位置推定法を用いているため、それぞれの位置推定結果は異なると想定されることから、「同時に同様の壊滅的な誤差を含む位置情報が算出されることは稀」という前提を置きました。
その前提のもとで、各位置推定法から算出された存在確率分布の類似性判別による選択的な統合をすることで、真の位置と著しく異なるバイアス分布を検出、排除することが可能となり、ロバスト性の向上が確認されました。
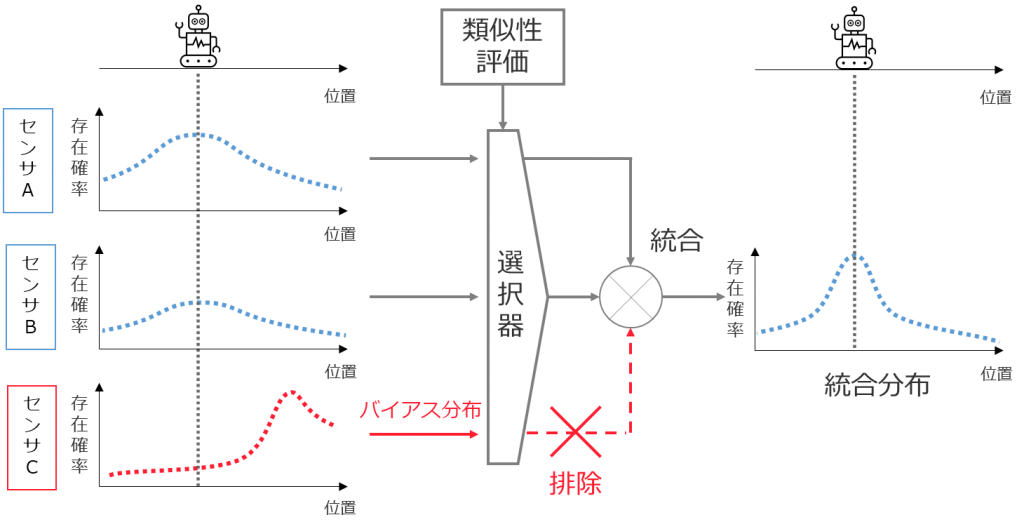
fig1: 選択的統合法
また、先行研究では選択的統合法により算出された経路上にセンサ毎の排除された領域をプロットした「信頼性マップ」を構築しました。
信頼性マップにより位置推定が破綻しやすい領域を可視化することが可能になり、センサを増設することでロバスト性が向上するという仮説が立てられました。
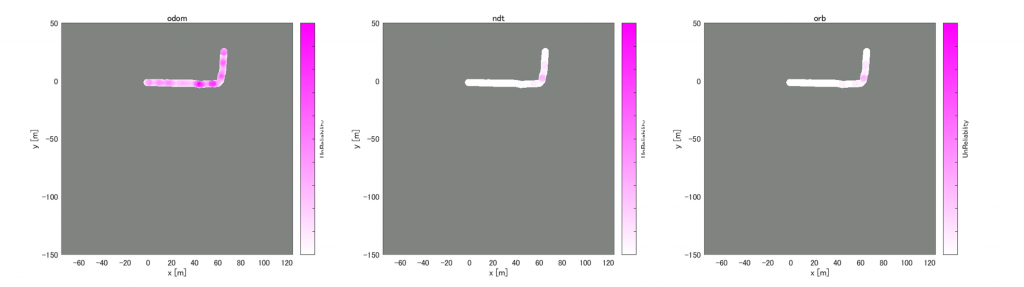
fig2: 信頼性マップ
研究内容
参考文献
// ここに本文を記入(英語)
–>
*/