
- 名前:
- 山口 拓馬
- 学年/肩書:
- 博士課程前期課程2年
- 役職:
- したっぱ
- グループ:
- ロボット
- 趣味:
- 弾き語り
- 一言:
- 研究は楽しいです。
研究テーマ / Research topic
歩行機能低下の予防を目指した常時着用可能な靴下型皮膚刺激デバイスの開発
キーワード/Keywords
歩行支援デバイス, 皮膚刺激, 細径人工筋
目次
研究概要
–はじめに
–研究背景
–研究目的と提案デバイス
サブテーマの研究内容
先行研究
発表業績
参考文献
研究概要
超高齢化社会において、高齢者の歩行中の転倒は深刻な問題であり、装着型デバイスによる歩行支援が注目されている。
本研究では、従来デバイスの課題であった身体的・認知的負担の大きさを解消した、常時着用可能な靴下型皮膚刺激デバイスを提案する。
このデバイスは、空気圧で収縮する細径人工筋による皮膚刺激を用いて足首動作を自然に促すことを目指しており、その歩行動作への影響を検証した。
その結果、歩行動作に従うような方向の刺激が、転倒リスク軽減に寄与する可能性が示唆された。
現在はこれらの結果を踏まえ、効果量の向上を目指して刺激タイミングおよび刺激強度の最適化に取り組んでいる。
はじめに
我々のグループでは、空気圧印加により収縮する細径人工筋を用いたデバイスに関する研究を行っている。
研究背景
超高齢社会の進展に伴い、高齢者の歩行中の転倒は、骨折・要介護状態・歩行意欲の低下等の悪影響を引き起こすことから大きな問題になっている。[1][2]
このような転倒の背景には歩行機能の低下によって、背屈(つま先を上げる動き)・底屈(つま先を下げる動き)という足首の動作が十分に行えていないことがある。
これに対し、装着型デバイスを用いた歩行支援が注目されている。
従来のデバイスは、モータと外骨格によるトルクを用いたもの[3]や電気刺激を用いて筋収縮を引き起こすもの[4]があるが、強制的な動作を引き起こすため身体的な負荷が大きいという課題がある。
また、振動刺激によってフィードバックを提示するもの[5]は、装着者が刺激を解釈して動作を行う必要があるため、認知的な負荷が大きいという課題がある。
身体機能や認知機能が低下した高齢者の長期使用において、身体的・認知的負荷の両面を低減した新たな支援デバイスが求められている。

従来のデバイス
研究目的と提案デバイス
本研究では、身体的・認知的な負荷の小さい新たなデバイスの開発を目指す。
負荷の小さな支援方式として、「強制しない」「考えさせない」支援を実現するため、皮膚感覚を介して動作を自然に誘導する方式に着目した。
また、着脱の容易性や着用時の快適性、高齢者が”機器”として意識しにくいという点から、靴下型のデバイス構成とした。
提案するデバイスを以下に示す。
本デバイスは、空気圧により収縮する細径人工筋を靴下の表面に配置した構造を有する。
人工筋の収縮によって生まれる引張感を伴う皮膚刺激を用いることで、背屈・底屈の動作を自然に促すことを目論む。
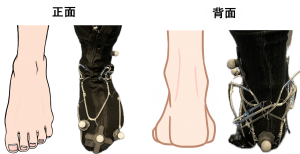
提案デバイス
サブテーマの研究内容
先行研究
発表業績
・令和6年度 東海支部連合大会.「細径人工筋を用いた方外転能動服における運動感覚強度の調査」.山口拓馬,深津暖,舟洞佑記,道木慎二(名古屋大学)
・ロボティクス・メカトロニクス 講演会 2025.「動作教示用能動服における肩動作知覚と人工筋配向パターンの力分布に基づく関係解析」.山口拓馬,深津暖,舟洞佑記,道木慎二(名古屋大学)
・SMC2025.「Presentation of Eight Motion Direction to the Forearm Utilizing Synthesis of Stimuli Generated by Cloth Deformation」.Haru Fukatsu, Takuma Yamaguchi, Yuki Funabora and Shinji Doki(Nagoya Univ.)