研究テーマ / Research topic
位置推定補助用UAV群を用いた作業用UAV位置推定システム
| English ver. | Japanese ver. |
位置推定補助用UAV群を用いた作業用UAV位置推定システム
研究背景
近年ではUAV(Unmanned Aerial Vehicle)飛行性能の進化に伴い、農業・空撮・点検・測量作業などさまざまな分野においてUAVの利用が注目されています。
現在作業員による操縦は一般的な作業用UAVの運用方法となっているので、作業成否が作業員の操縦スキルに依存してしまいます。そのため、UAVの自律飛行による効率的な作業が求められています。
農業においてUAVの自律飛行作業がすでに実用段階になっているが、点検作業において、自律飛行作業は未だに研究段階となっています。
自律点検作業における課題
UAVの効率的な自律点検作業の効率化には常にUAVの位置を把握することが必須となります。そのため、GNSS(全球測位衛星システム)がよく使われます。GNSSは受信可能の環境で有効に機能するが、多くの点検作業が構造物付近で行うので、位置推定が困難となります。
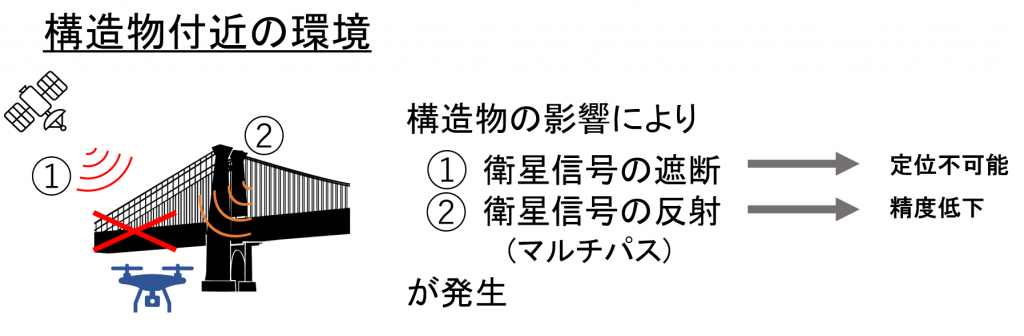
そのため、本研究は位置推定補助用UAV群を用いた構造物付近でのUAVによる自律点検作業の効率化を目指しています。
先行研究
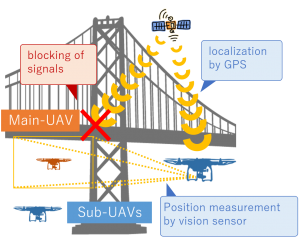
衛星信号の遮断を解決するため、先行研究では、複数のUAVを用いた位置推定システムを提案しました。このシステムでは、GNSSによる補助UAVの位置情報と、カメラによる補助UAVとの相対位置情報を統合することで作業用UAV自己位置推定性能の向上を出来ました。このシステムを用いて、UAVに標準搭載されているGPSやカメラのみで自己位置推定が可能となります。
しかしながら、衛星信号の反射(以下マルチパス)の発生がまだ未解決だと残してしまいました。
研究内容
本研究はUAV機群間の情報統合によるマルチパスが発生する空間を検出しながら、その空間から回避できる経路の再計画を目指しています。
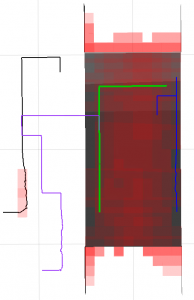
下図が橋モデルとUAV群の飛行経路を示しています。先行研究の手法で補機群(黒線、紫線、青線)が常に衛星信号受信可能と主機を観測できる位置で飛行するので、作業用UAVに対して、衛星信号の遮断を解決できたが、右図のように、補機経路上に衛星信号の反射(赤枠)が発生すると、システムが破綻します。そのため、本研究は衛星信号の反射が発生する空間にいる部分の経路を再計画し、システムのロバスト性の向上を図っています。
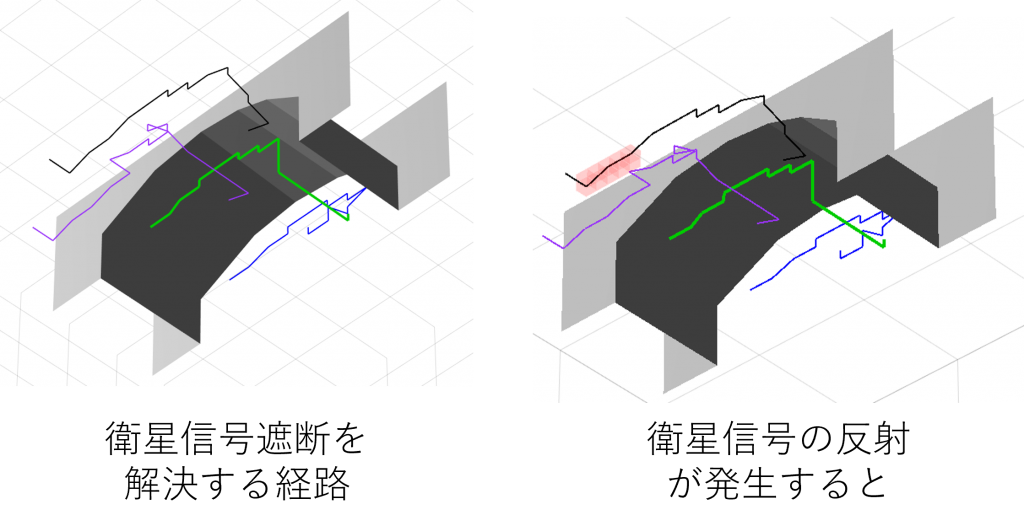
現状としては、下図が示した通り、衛星信号の反射が発生する空間にいる部分の経路を再計画し、その空間から避けようとする経路をできたが、まだ不十分だといえるので、更なるの検討が求められています。
ap
Realization of the localization system by multiple UAVs
Background
In recent years, with the evolution of UAV (Unmanned Aerial Vehicle) flight performance, the use of UAV has been attracting attention in various fields such as agriculture, aerial photography, inspection, and surveying work.
Currently, maneuvering by workers is a general operation method of UAVs for work, so the success or failure of work depends on the maneuvering skills of workers. Therefore, efficient work by autonomous flight of UAV is required.
UAV autonomous flight work is already in the practical stage in agriculture, but in inspection work, autonomous flight work is still in the research stage.
Issues in autonomous inspection work
It is essential to always know the position of the UAV in order to improve the efficiency of the UAV’s efficient autonomous inspection work. Therefore, GNSS (Global Positioning Satellite System) is often used. Although GNSS works well in receivable environments, it is difficult to estimate its position because many inspections are done near the infrastractures.
Therefore, this research aims to improve the efficiency of autonomous inspection work by UAV near the infrastractures using the UAV group for position estimation assistance.
Previous research
In order to solve the satellite signal blockage, the previous research proposed a position estimation system using multiple UAVs. In this system, the position information of the auxiliary UAV by GNSS and the relative position information of the auxiliary UAV by the camera can be integrated to improve the self-position estimation performance of the working UAV. Using this system, self-position estimation is possible only with the GPS and camera installed as standard on the UAV.
However, the occurrence of satellite signal reflection (multipath) is still unsolved.
Content
This research aims to re-plan the route that can be avoided from the space while detecting the space where multipath occurs due to the information integration between UAV aircraft.
The figure below shows the bridge model and the the flight pathes of UAV group. Since the auxiliary equipment group (black line, purple line, blue line) always flies at a position where satellite signal reception is possible and the main engine can be observed by the method of the previous research, it was possible to solve the satellite signal interruption for the work UAV. However, as shown in the figure on the right, if satellite signal reflection (red frame) occurs on the auxiliary equipment path, the system will fail. Therefore, this research is trying to improve the robustness of the system by replanning the route of the part in the space where the reflection of the satellite signal occurs.
At present, as shown in the figure below, we have re-planned the route of the part in the space where the reflection of the satellite signal occurs, and we have made a route to avoid it from that space, but it can be said that it is still insufficient, so further It is required to consider becoming.