
- 名前:
- 林 知紀
- 学年/肩書:
- 卒業生
- 役職:
- したっぱ
- グループ:
- ロボット
- 趣味:
- 太鼓の達人
研究テーマ / Research topic
布状アクチュエータを構成する人工筋配向と提示可能な力分布の関係の調査
研究を一言で
私の研究目的は、「動く布」を巻き付けたときに発揮する「力」を望んだ形で作り出すことです。
研究概要
近年、触覚を提示するウェアラブルデバイスの開発が進んでいます。
VRなどのエンターテインメントや遠隔操作などの作業を行う時に、視覚・聴覚の情報に加え、さらに触覚情報を着用者に与えることで、実際に体験した時の感覚により近づけることができます。 これは仮想現実上での没入感の向上や、作業の精度向上に大きく繋がるでしょう。

これらのウェアラブルデバイスはある程度長時間の使用が見込まれるため、なるべく軽量かつ人の動きを阻害しない、自然な装着感の物が好ましいでしょう。
ここで、我々の研究グループで開発された布状アクチュエータの出番です。
布状アクチュエータは、空気圧を印加することで収縮するMcKibben型人工筋を布に固定することで、収縮によって布を動かすデバイスです。
軽い布とゴムチューブとメッシュから出来た人工筋で作られたデバイスなので、柔らかく軽量という条件を満たしています。
人工筋の配置方法は自由で、空気圧の印加方法によって多様な変形を及ぼすことができます。 このデバイスをヒトの体に巻き付けることで布変形による圧力・せんだん力が身体に伝わり、触感覚を想起させます。
人工筋配置の自由度の高さから、布状アクチュエータによって出力可能な圧力・せんだん力が作り出す「力分布」も高い自由度を持ちます。

この力分布を実際に触感覚を受ける際に発生する力分布に近づけるように人工筋配置や印加する空気圧を決めてやれば、様々な触感覚を提示するデバイスとして期待できるでしょう。
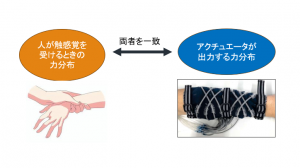
しかし布状アクチュエータの出力する力分布と人工筋配置の関係性は、自由に力分布をデザインできるほど明らかにはされていません。
そこで私の研究では、触覚提示デバイス利用を見据えて、布状アクチュエータを巻き付けた際に発生する力分布の例を取ってくることでその関係性を解析します。
目標は、任意の力分布が与えられた際にそれを可能とする人工筋の配置と空気圧を出力するシステムを作成することです。
実際の取り組み
2本の人工筋が作り出す力分布の例をセンサを用いて計測することで、その関係性から2本人工筋が作るあらゆる分布を予測することを目指します。
