
- 名前:
- 齋藤 勇太朗
- 学年/肩書:
- 博士課程後期課程2年
- 役職:
- したっぱ
- グループ:
- モータ
- 趣味:
- 研究
- 一言:
- 目の前のことを一つ一つ研究します。
研究テーマ / Research topic
停止・低速域におけるSPMSMの位置センサレス制御
電圧重畳による停止・低速域におけるSPMSMの位置センサレス制御
Research Theme
Position Sensorless Control of SPMSM at Standstill and Low Speed Region Based on Voltage Injection
キーワード / Keywords
永久磁石同期モータ,位置センサレス制御,停止・低速域
1. 永久磁石同期モータ
永久磁石同期モータ(PMSM: Permanent Magnet Synchronous Motor)は、交流電圧によって駆動されるモータで、家電・電気自動車などで幅広く応用されている。
一般的にこのPMSMを駆動するためには,磁石の位置を検出するための位置センサが必要となる。

図1 PMSMと位置センサ
しかし,位置センサには,外枠寸法が大型化,価格が高騰,信頼性の低下といった問題がある。
そこで,位置センサを用いずともPMMSの制御が可能な位置センサレス制御について研究をしている。
モータは角度によって流したい電流や電圧が違う。そのため,効率を上げるためには,位置センサで角度を知る必要がある。
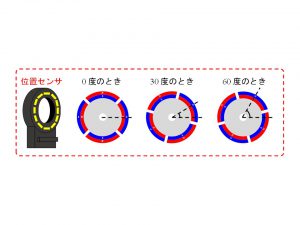
モータの角度と位置センサ
位置センサの種類は,エンコーダとレゾルバに大別することができる。ここでは,エンコーダの簡単な原理について図解する。
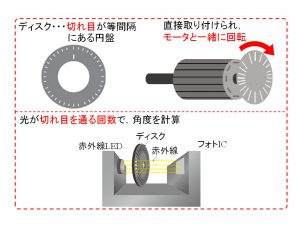
位置センサ(エンコーダ)の原理
しかし,位置センサは上図のような原理に基づいているため,ディスク振動するような環境では精度が低下し,ディスクが割れるとモータ制御ができない。
2. PMSMの種類と位置センサレス制御
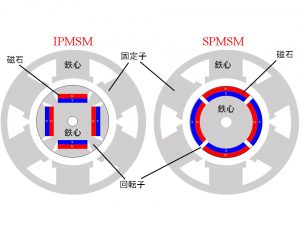
PMSMは回転子の構造により,埋込磁石同期電動機(IPMSM)と表面磁石同期電動機に大別できる。IPMSMは磁石が回転子の鉄心内部に実装されていることに対して,SPMSMは磁石が回転子の鉄心表面に実装されている。
 ,./p
,./p
図2 IPMSMのSPMSMの断面図位置センサ(エンコーダ)の原理
2.1 位置センサレス制御
このIPMSMとSPMSMの回転子構造の違いから位置センサれせ制御可能な速度域および方式が変わる。
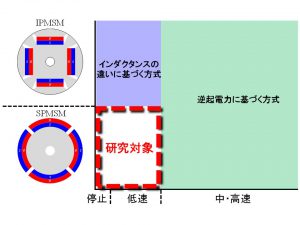
図3 IPMSMとSPMSMの位置センサレス制御の方式および適応速度域
IPMSMの停止・低速域では,モータの角度によって変化するインダクタンスを利用した方式が採用される。一方で,IPMSMとSPMSMの両方の中・高速域では,モータの回転によって生じる逆起電力を利用する方式が採用される。
しかし,SPMSMの停止・低速域に適応可能な位置センサレス制御方式は確立されておらず,これが私の研究対象である。
SPMSMとIPMSMの中・高速域で適応される逆起電力に基づく方式について簡単に説明する。
モータは回転すると,発電機としても動作し,電圧(逆起電力)を生み出す。このとき,逆起電力の波形は下図のようにモータの回転速度と同じ周波数成分をもつ。
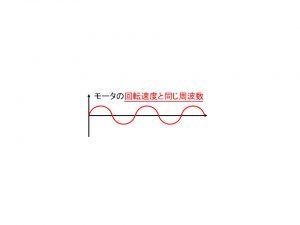
逆起電力に基づく方式
つまり,逆起電力を知ることができれば,位置推定が可能となる。一方で,発電機として動作しない停止時では位置推定が不可能となる。
つづいて,IPMSMの停止・低速域において適用されるインダクタンスの違いについて簡単に説明する。
インダクタンスとは,磁束の通りやすさでもある。モータでは,磁束が通る経路に鉄心が多いほど通りやすい。
下図にIPMSMとSPMSMのそれぞれの磁束の通る経路について示す。
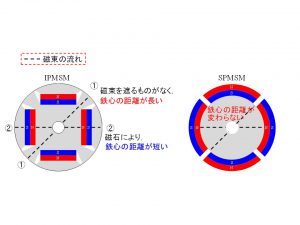
インダクタンスの違いに基づく方式
IPMSMはモータの角度によって,磁束の通りやすさ(インダクタンス)が変化する。
つまり,インダクタンスがわかれば位置推定が可能となる。
しかし,SPMSMはモータの角度によって,インダクタンスが変化しないため,インダクタンスの違いに基づく手法が適用できない。
2.2 SPMSMの停止・低速域における位置センサレス制御
私が提案する手法は,SPMSMへ電圧重畳をおこない,発生した角度振動によって励起される誘起電圧から位置推定する方式である。
これは,電圧を重畳することで,モータが微小に振動することで発生する逆起電力を利用して,位置推定をおこなう。
この手法であれば,SPMSMの停止・低速域においても適用が可能であると考えた。
はじめに,この位置推定法を確立するために,電圧重畳がモータの角度振動に与える影響と励起される誘起電圧の大きさの関係を調査した。
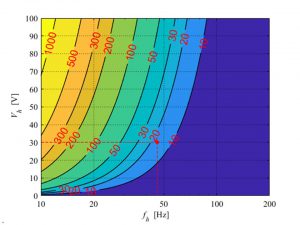
図4 電圧重畳が角度振動に与える影響
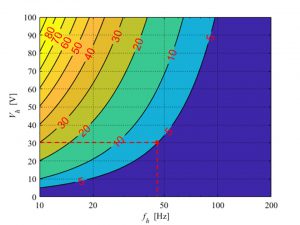
図5 電圧重畳が誘起電圧に与える影響
調査結果から位置推定に必要な誘起電圧が得られる重畳電圧が明らかとなった。一例として,30 V,45.4 Hzが挙げられる。これは重畳電圧としては十分現実的な値であり,提案手法が実現可能である根拠の1つを示すことができた。