- 名前:
- 今井 幸司
- 学年/肩書:
- 卒業生
- 役職:
- N/A
- グループ:
- モータ
- 趣味:
- Reading Books
研究テーマ / Research topic
二重三相同期モータの位置センサレス電圧位相制御
Research Theme
Position Sensorless Voltage Phase Control for Dual Three-phase Synchronous Motor
キーワード / Key words
多相モータ,二重三相同期モータ,過変調駆動,位置センサレス制御
Multi-phase motor, dual three-phase synchronous motor, overmodulation drive, position sensorless control
| 目次 | Contents | ||
| 研究背景 | Background |
研究背景
三相以上の相数の固定子巻線から構成される多相モータは,制御の自由度の増加による高信頼性や,巻線並列化による高出力密度化の観点から,注目を集めており,航空機,船舶,自動車などの分野での適用が期待されています.多相モータには,下図に示すように,N相モータとM重三相モータの2種類の巻線構造が存在しています.
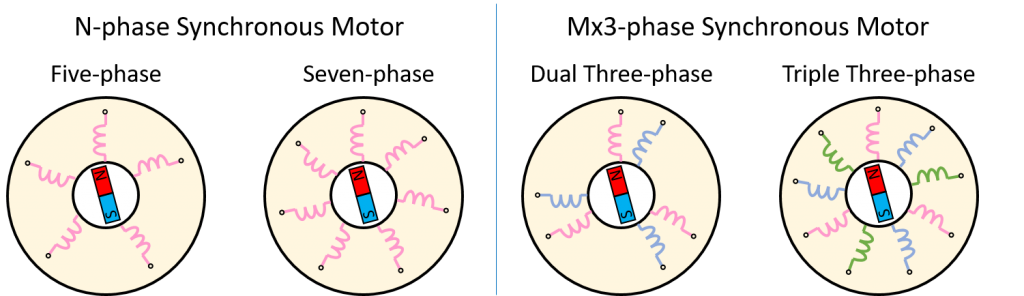
N相モータの制御には一般にN相インバータが必要となります.例えば,五相モータは五相インバータが,七相モータは七相インバータが必要となります.そのため,従来用いられている三相モータとは異なる制御技術が求められます.
一方,M重三相モータは,M台の三相インバータで駆動することが可能です.例えば,図に示す二重三相モータならば二台の三相インバータで,三重三相モータならば三大の三相インバータで駆動できます.従って,従来三相モータ駆動システムで用いられてきた制御技術を応用することが可能です.
N相モータとM重三相モータの特徴を比較して,多相モータの利点の活用と三相モータで培われた技術の応用を両立するため,私は二重三相モータを対象に研究しています.
研究目的
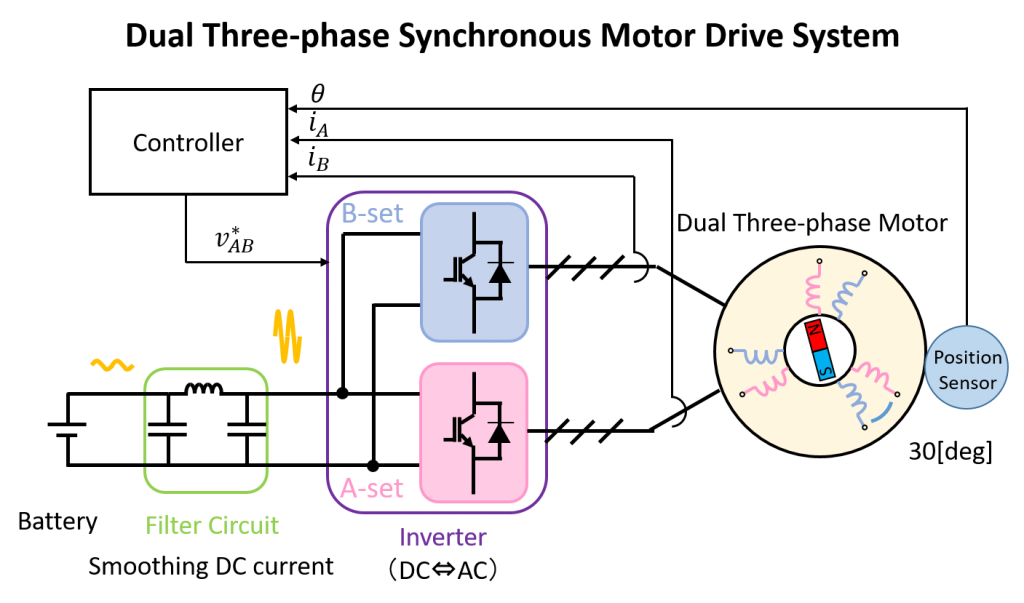
上図に研究対象である,二重三相同期モータ駆動システムを示します.二重三相モータの駆動のためには,直流電圧源であるバッテリ,指令値に応じて直流電圧を交流電圧に変換するインバータ,バッテリを保護するためのフィルタ回路,回転子の位置と速度を検出する位置センサ,指令値を計算する制御器が必要です.
二重三相同期モータ駆動システムには更なる高出力密度化が要求されています.高出力密度化のアプローチにはハードウェアの小型化に加えて,制御技術の工夫による小型化があります.本研究では,後者のアプローチに注目し,制御技術の改善を検討しています.
位置センサはモータの回転軸に取り付けられるため,モータの全長の約3割程度を占めてしまいます.ここで,位置センサを取外すことができれば,その設置スペースを省くことが可能となり,モータ駆動システムの小型化に寄与します.そこで,位置センサを使用しない制御である,位置センサレス制御が求められています.従って私は現在,二重三相同期モータ向けの位置センサレス制御を研究しています.
研究成果
K. Imai et al, “Position sensorless control for wound-field synchronous motor with double three-phase wound stator using extended electromotive force model”, ICIT 2018, Lyon, France
Background
Multi-phase motors whose stator winding has more than three phases are gaining attention because of high reliability due to the increased degree of freedom regarding control and high power density due to the parallelization of windings and switching devices, hence they are expected to be applied into fields of airplanes, ships and vehicles. There are two classification of multi-phase motors as shown below, N-phase synchronous motors and Mx3-phase synchronous motors.
N-phase synchronous motors generally need N-phase inverters. For instance, five-phase synchronous motors need five-phase inverters and seven-phase synchronous motor need seven-phase inverters. Therefore, it is required to apply control technologies which is different from ones for conventional three-phase motors.
On the other hand, Mx3-phase synchronous motors need M sets of three-phase inverters. For instance, dual three-phase synchronous motors need two sets of three-phase inverters and tripple three-phase synchronous motors need three sets of three-phase inverters. Therefore, it is possible to apply control technologies used for conventional three-phase synchronous motor drive systems.
Comparing N-phase synchronous motors and Mx3-phase synchronous motors, in order to balance out merits of multi-phase motors and technologies developed for three-phase motors, I decided to target dual three-phase synchronous motors.
Research Purpose
The figure above shows a drive system for dual three-phase synchronous motor. The battery supplies DC voltage to the system, the inverter converts DC voltage to AC voltage in accordance with voltage reference, the filter circuit protects the battery, the position sensor detects position and speed of the rotor, and the controller calculates voltage reference.
The dual three-phase synchronous motor drive system is required to be further higher power density. There are two approaches to realize high power density, downsizing hardwares and downsizing by control. This study investigates the latter approach and improvement of control technologies.
The position sensor is installed on the shaft, which makes it occupy approximately 30 % of the whole length. By getting rid of the position sensor, the installation space can be saved, which contributes to downsizing the motor drive system. Hence, position sensorless control is expected and my research purpose is to realize position sensorless control for dual three-phase synchronous motor.
Publication
K. Imai et al, “Position sensorless control for wound-field synchronous motor with double three-phase wound stator using extended electromotive force model”, ICIT 2018, Lyon, France