
- 名前:
- 西川 大輝
- 学年/肩書:
- 博士課程前期課程2年
- 役職:
- したっぱ
- グループ:
- ロボット
- 趣味:
- 研究
研究テーマ / Research topic
自律移動ロボットの安定走行に向けた位置推定精度を考慮した経路計画
| English ver. | Japanese ver. |
自律移動ロボットの安定走行に向けた、位置推定を考慮した経路計画に関する研究を行っております。
現在は先行研究[1]によって提案された「信頼性マップ」に基づいて、あらたな信頼性マップの構築とそれに基づく適切な経路計画によって、ロボットを安定走行させることを目指しています。
研究背景
近年、少子高齢化による労働人口の減少・業務効率化の意識から以下の様な配膳ロボット[2]、搬送ロボット[3]などの自律移動ロボットが広く普及しています。
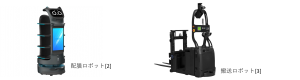
fig1: Nishikawa ロゴ
それらの自律移動ロボットの安定走行のためには、センサ情報から自身の現在位置を推定する位置推定、目標位置までの経路を計画する経路計画と呼ばれる技術が必要不可欠です。しかし、これらは2つを独立に考えて研究することが多いです。そこで、我々は、位置推定精度を考慮した経路計画により、位置推定と経路計画を陽に密接に関連付けさらなる安定走行を目指しています。
自己位置推定とは
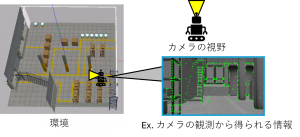
fig2: Camera構成
自己位置推定とは、センサのデータから自身の現在の位置を推定する技術です。
たとえば、カメラは画像から得られる特徴点をもとに自身の移動量から自分自身の現在位置を推定しています。
自己位置推定の課題として、センサの位置推定精度が環境によって変化するといったことが挙げられます。
カメラであれば、暗所やレンズに光が当たるような場所では位置推定をすることが困難です。一方で、LiDARはそのような環境には左右されませんが、トンネルなどの周囲に障害物が少ない環境において位置推定の精度が低下してしまいます。
そこで、センサの組み合わせや、センサに適した移動経路が求められます。
計画計画とは
figX: Path 構成
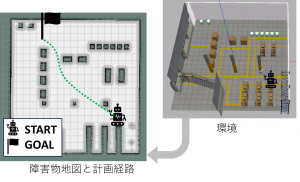
経路計画とは、上図のような環境から得られる障害物地図を用いて、現在の位置から目標位置までの障害物を避ける一連の経路を算出する技術になります。
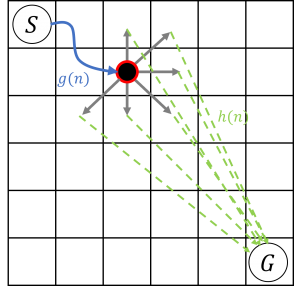
例えば、グラフ探索法のA*アルゴリズムがあります。グラフ探索法とは、走行空間をノードとエッジで構成されるグラフで表現し、コスト関数に従って経路全体の通過に要するコストが最小となる経路を探索する手法です。A*アルゴリズムはダイクストラ法に目標値までのコスト推定値を表すヒューリスティック関数を導入・拡大した手法です。g(n)はスタートノードからノードnまでのコスト、h(n)はノードnからゴールノードまでのコスト推定値を表しています。A*アルゴリズムでは、トータルコストf(n) = g(n)+h(n)を最小にするノード探索を行います。
figX: Nishikawa システム構成
研究内容
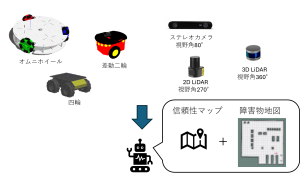
fig1: 構想
上述の位置推定と経路計画を密接に考慮した研究を行っています。
先行手法[1]によって提案された信頼性マップをもとに、位置推定の信頼性を仮想的な障害物として経路計画に反映させることで、安定走行を目指しています。
現在は、既存の信頼性マップで考慮できていなかった部分を考慮した信頼性マップの構築とともに、センサ構成やロボット機構に応じた信頼性マップと経路計画に関する研究を進めています。
本研究で用いる、複数センサの選択的統合と信頼性マップ
ロボット自身に搭載した複数センサの併用法として、先行研究[1]による複数センサの選択的統合法が提案されました。
先行研究では特性の異なる複数センサからそれぞれ異なる位置推定法を用いているため、それぞれの位置推定結果は異なると想定されることから、「同時に同様の壊滅的な誤差を含む位置情報が算出されることは稀」という前提を置きました。
その前提のもとで、各位置推定法から算出された存在確率分布の類似性判別による選択的な統合をすることで、真の位置と著しく異なるバイアス分布を検出、排除することが可能となり、ロバスト性の向上が確認されました。
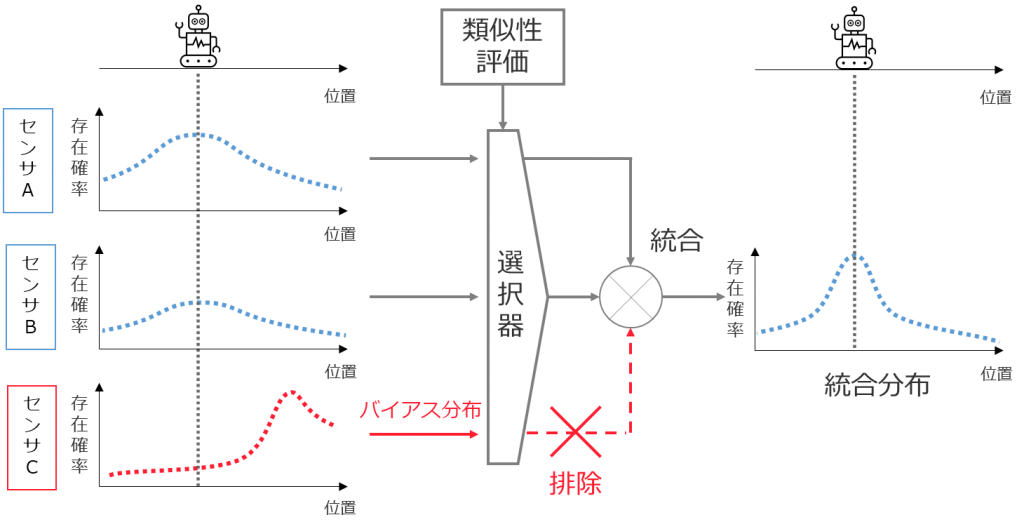
fig2: 選択的統合法
また、先行研究では選択的統合法により算出された経路上にセンサ毎の排除された領域をプロットした「信頼性マップ」を構築しました。
信頼性マップにより位置推定が破綻しやすい領域を可視化することが可能になり、センサを増設することでロバスト性が向上するという仮説が立てられました。
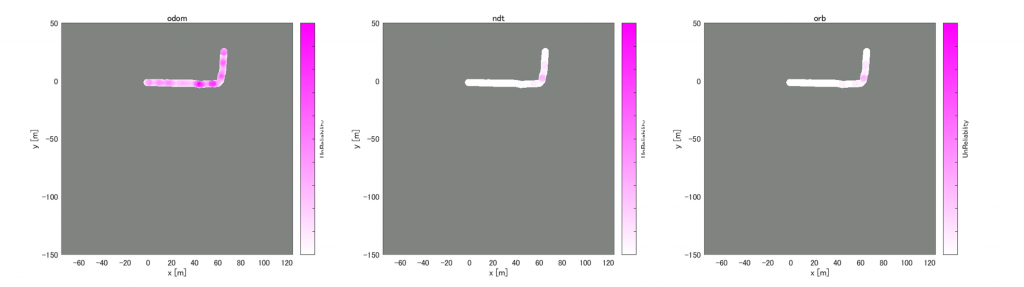
fig3: 信頼性マップ
本研究では、信頼性マップの構築とその信頼性マップを用いた経路計画により、安定走行を目指しています。
[/su_spoiler][/su_accordion]
参考文献