研究テーマ / Research topic
多様なロボットの協調による大規模構造物の外観データ収集システム
背景 -インフラ構造物の老朽化-
橋梁などの構造物は老朽化の一途をたどり,維持管理が課題となっています.特に異常が軽微な段階で補修するために早期段階で発見することが重要視されてきています.これを国土交通白書などでは「予防保全型メンテナンス」と呼称しており,今後のメンテナンスコストを3割程度削減できると試算されています(参考:令和五年度国土交通白書).
この予防保全型メンテナンス実現のために,例えばコンクリート橋梁では0.1~0.2mm,つまり髪の毛1本分程度の細さのヒビを発見することが要求されます.この早期段階における微小な異常の発見は,足場や作業車を用意した上で,高所含め人間が確認・記録するという手法が取られてきました.
これまでの道木研究室の取り組み
道木研究室では,マルチコプタ型無人航空機を用いた自動写真計測による作業代替の可能性について研究してきました.
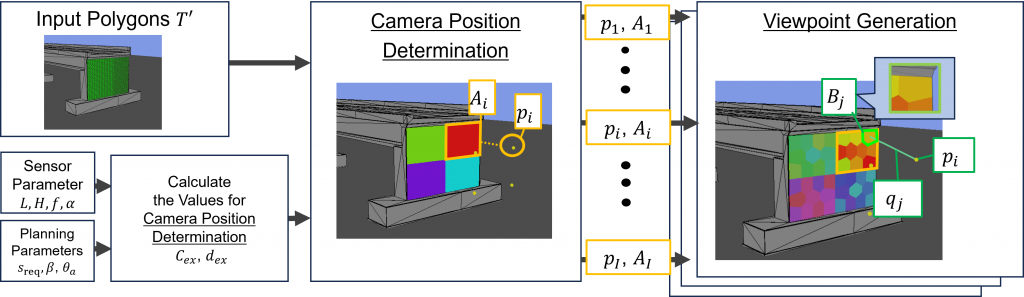
幣研究室に所属していた麻によって,理論検討が進められました.このプランニングアルゴリズムでは見つけたい異常に応じて必要な空間分解能値に基づいて,写真計測を行うべき場所の組み合わせを決定します.
解決すべき課題・現在の取り組み内容
麻により確実な異常検知を実現する自動点検への兆しが見えた一方,地球全体に存在する全インフラの点検自動化に向けて,二つの課題が存在します.
- 「正対した計測をおこなう」という制約をしいており,ロボット本来のポテンシャルを活かせていない
- 大規模な対象を効率的に点検するためにどのように協調すべきかが明らかではない
本研究では,「異常検知できない品質のデータが混ざった場合,集めたデータセット全体が無価値となる」という,点検の特性を反映しつつ解決できるようなプランニングを目指しています.
このコンセプトの下で,特にデータ品質に関する要件については,使用機材のスペック・対象形状モデルに基づいて,確実に要件を満たすようにプランニングが実現される手法を提案しています.既存の論文とは異なり,論文読者が解決したい問題に応じて設定すべきパラメータが明らかな論文を公開することを心がけています.
正対制約により,ロボット本来のポテンシャルを活かせていない
提案手法は,「点検対象面に対して,カメラが正対でない方向を向いた状態で計測する動作」,を積極的に活用することを目指しました.
提案手法ではジンバルによる角度変更を,UAVによる点検の時間効率改善に寄与するようにプランニングすることが可能です.加えて,一部サービス提供が始まっている地上ロボットによる外観点検においても,今後は提案手法により適切な計測位置を提案することが可能です.
動作特性の確認や効率比較については,下記動画もご参考ください.
※本動画はIEEE ACCESSにへ投稿・掲載された論文に,付録として提出した動画と同一のものです
既存のプランニングアルゴリズムのほとんどは,対象を正対状態で計測することを前提にアルゴリズムが設計されています.
その原因は,「正対状態かつなるべく遠くから計測するという戦略で回数を最小化すれば,それが最高効率である」「角度の最適化を諦めることで解空間を小さくしたい」という発想に基づいていると考えられます.しかしこの動作は,ジンバルという機構の能力を活かすことができません.加えて,暗黙に点検にはUAVを用いるべきだ,という発想にもつながってしまいます.
そこで本研究では,角度のついた計測を敵視する既存の発想から転換し,得られるデータ等の特性を把握したうえで最大限活用することを目指しました.
特に非正対状態へのカメラ角度変更は,収集データに幾何的なひずみなどを引き起こすことは明らかです.このひずみによる分解能劣化を,プランニングアルゴリズムが評価に用いることができるよう数式表現し,アルゴリズムへ組み込みました.提案アルゴリズムは対象との距離・角度を適切に調整することで,十分な画素分解能のデータが収集可能なプランを生成します.
提案手法では壁面計測点検のシミュレーションにおいて40%以上の作業時間短縮を達成しました.また,プランニングの計算時間についても90%以上の短縮を実現しました.加えて,地上ロボットによる自動点検を想定した実世界実験においても,提案手法が実用につながるクオリティのデータ収集につながることを確認しました.
大規模な対象を効率的に点検するためにどのように協調すべきかが明らかではない
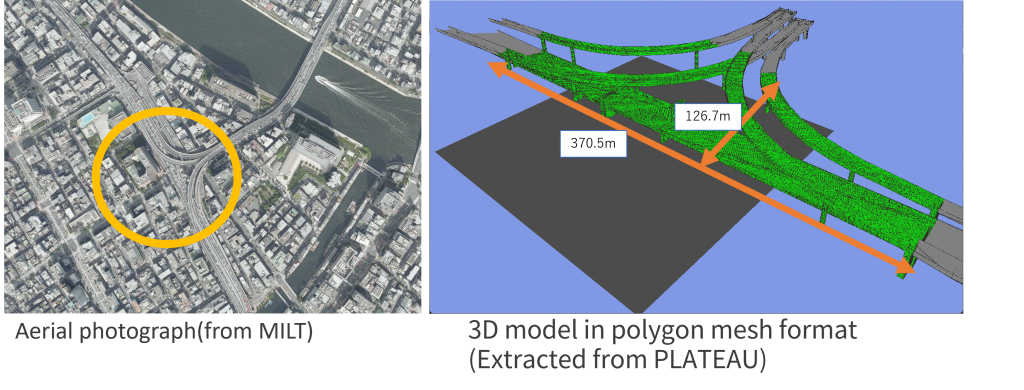
現在提案されているデータ収集計画手法の多くは,一度の作業で全域データを取得できるという暗黙の前提の下で提案されています.しかしこのような手法は実用化の際,事前に人の手で作業分担を決定しなければ使い物になりません.瀬戸大橋をはじめとして,多くの大型構造物は協調して点検する必要があると考えています.
協調には二つの要素が要求されます.
- 各ロボットが効率的に作業可能であること
- ロボット同士で衝突しないこと
これらの要素を事前のプランニング段階で保証することで,現場での負担を最低限に抑えることができるのではないかと考え研究に取り組んでおります.
以下に学会で報告した成果について掲載します.
形状メッシュモデルの分割に基づくタスク分担の基礎検討
該当する学会予稿へのリンク,SIYA-SII2025受賞
※現在HP掲載用に権利確認及び情報整理中
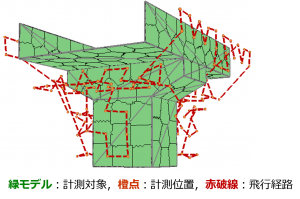
100 m 規模の橋梁について,0.2 mm 幅のヒビを検知するというシナリオでの点検自動化を目指すための初期検討を扱っています.
分担と点検を同時に解決する最適解の算出は現実的な時間では完了しないと考えられます.この問題を,対象形状のメッシュモデルの分割を行い,その後各領域にプランニングアルゴリズムを適用するというシステムの提案,及び簡易な分割アルゴリズムによるシステムの検証を行いました.
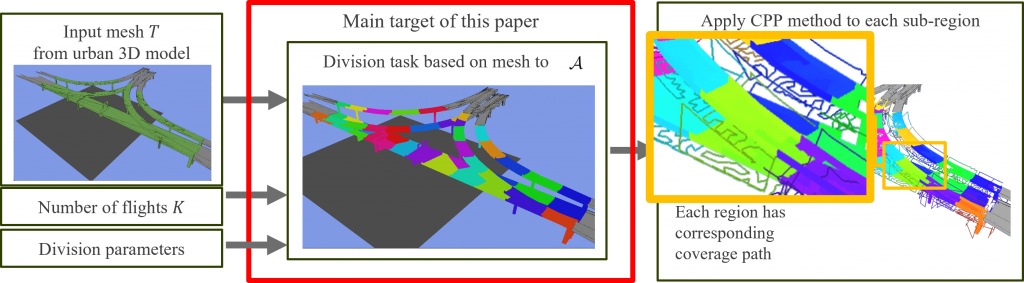
詳細については,学会予稿もご確認いただけると幸いです.
残念ながら現在まだ作業を効率的かつ均一な分割の実現には至っていない状況にあります.この研究を更に進行させ,「点検分担に適したメッシュ分割とはどのようなものなのか」を明らかにすることを目指しています.
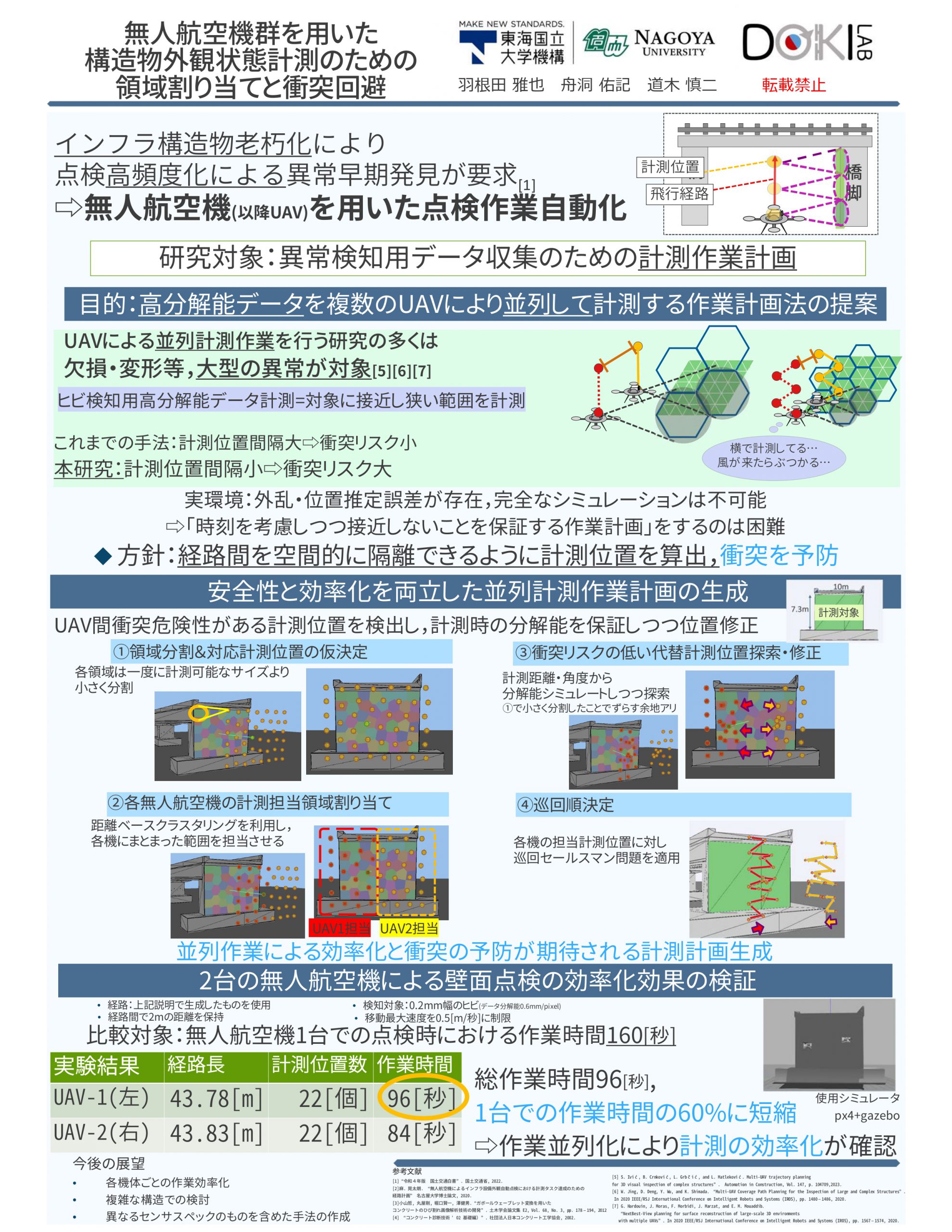
ロボット間衝突予防に向けた計測位置の補正
(ROBOMECH2023にて発表, HP掲載用に再編集した資料)