
- 名前:
- 吉田 裕悟
- 学年/肩書:
- 博士課程前期課程1年
- 役職:
- したっぱ
- グループ:
- モータ
- 趣味:
- 麻雀,将棋などのボードゲームとカラオケと研究
- 一言:
- 今月は麻雀打ちます
研究テーマ / Research topic
二重三相同期モータのための信号重畳により励起される拡張誘起電圧を用いた停止低速域位置センサレス制御のパラメータ誤差に対するロバスト化
| English ver. | Japanese ver. |
19E
ap
研究概要
電気船舶や電動航空機,電気自動車など,様々なアプリケーションの電動化の潮流により,高出力・高安全性・低トルク脈動が要求されている。そこで,三つの要求を満たす二重三相同期モータに着目し,位置センサレス制御による高性能化を目指す。
目次
二重三相同期モータ
研究に利用する二重三相同期モータ(DTP-PMSM : Dual Three-Phase PMSM)の構成を以下に示す。
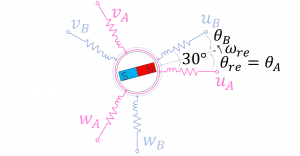
DTP-PMSMは二組の三相巻線を固定子に用いたモータであり,以下の優れた特徴を有する。
- 高出力
- 高安全性
- 低トルクリプル
- 既に普及されている三相インバータを用いて駆動可能
- 三相PMSMの培われた制御技術を継承可能
二重三相同期モータの制御
二重三相同期モータで三相同期モータ(PMSM)と同様のベクトル制御を行う際,巻線組間の干渉が制御上の課題となる。そこで,巻線組間の干渉をなくすためにDTP-PMSMでは,基本波成分と高調波成分を分離するベクトル空間分解(VSD : vector space decomposition)を用いる。これにより,DTP-PMSMを基本波を主成分とする和系統PMSMと,高調波を主成分とする差系統PMSMの二つのPMSMとして独立に制御することができる。
位置センサレス制御
PMSMでは高応答・高精度な制御を行うために,電流ベクトル制御手法が適用されている。この制御手法ではPMSMの回転子磁極位置に基づいた回転座標系で制御を行うため,回転子磁極位置が必要である。そこで,回転子磁極位置検出のためのセンサ(位置センサ)として,一般的にレゾルバやエンコーダ等が使用される。
しかし,センサを用いるにはセンサ自体のコスト,設置スペースの確保,信頼性の低下といった課題が挙げられる。そこで,位置センサを用いず,制御器内部のソフトウェアを用いて電圧・電流信号から位置推定を行うことで,それを利用してベクトル制御を行う位置センサレス制御が注目され,多くの研究がなされている。このPMSMでの制御技術をDTP-PMSMへ適用させ,実機実装を目論んでいる。
研究内容
DTP-PMSMでの位置センサレス制御手法として,PMSMにて全速度域を単一の拡張誘起電圧推定器を用いて位置推定を行う手法[1]をDTP-PMSMに適用させた手法[2]が提案された。この手法では,VSDを利用することで,和系統でトルク制御,差系統で位置推定を独立して行うことができ,PMSMでの手法よりも簡単にオブザーバを設定することができる。
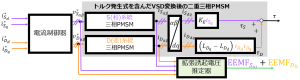
しかし,DTP-PMSMの数式モデルに基づいて位置推定を行うために,抵抗やインダクタンスといったパラメータの公称値を利用しているため,実機実装にあたり,温度条件や電流条件により抵抗やインダクタンスは公称値から変動してしまうので,動作点によっては,DTP-PMSMのパラメータ真値と制御器内でのパラメータ設定値間での誤差が大きくなることで,位置推定が破綻してしまう。そこでこの手法のパラメータ変動に対するロバスト化を目標として研究に取り組んでいる。
関連研究
[1]二村 拓未, 道木 慎二: “信号重畳と速度により励起される拡張誘起電圧を利用した永久磁石同期モータの全速度域位置センサレス制御”, 電学論D, vol.140, No.8, pp.589-596
[2] R. Hao and S. Doki, “Position-sensorless control of dual three-phase synchronous motors in all speed ranges with a single linear observer of extended emf excited by signal injection and speed,” IECON 2025 – 51st Annual Conference of the IEEE Industrial Electronics Society, pp. 1–6, 10 2025. [Online].
発表業績
[1]令和7年度 電気学会研究会 「二重三相同期モータにおけるVSD座標系上での高周波信号重畳により励起される拡張誘起電圧による位置推定のモータパラメータ変動に対するロバスト性」. 吉田裕悟,ハオロンジャオ,道木慎二(名古屋大学)