
- 名前:
- 安田 怜司
- 学年/肩書:
- 博士課程前期課程1年
- 役職:
- したっぱ
- グループ:
- ロボット
- 趣味:
- お城巡り、ゲーム
研究テーマ / Research topic
衣服変形に伴う体表面刺激を活用した人工筋駆動型ハプティックスーツによる複合動作制御
| English ver. | Japanese ver. |
研究背景
運動学習とは各種の運動技能を獲得する過程です。これは、ダンスやスポーツといった分野で動きを覚える際に行われていることです。何らかの動きを覚えたいとき、私たちはよく外部からの支援を活用しています。例えば一般的なものとして、映像を見ながら自身の体の動かし方を修正していく手法が存在します。しかし、映像と実際の動作が本当に一致しているか分からないため、ずれがどうしても残ってしまうという課題があります。
このずれに対応するために、装着型デバイスを用いた運動学習支援というものに注目が集まっています。しかし、従来の装着型デバイスは対象とする動作に制約を持っているものがほとんどです。運動学習支援を行うにあたり、複雑な動作を直感的に教えることのできる装着型デバイスが要求されます。
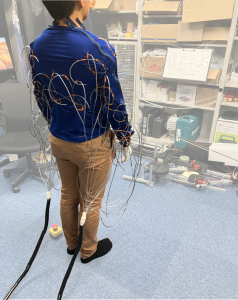
衣服型デバイス装着の様子
そこで、私たちの研究室ではFunabot-Upperと呼ばれる、体表面刺激に着目した衣服型デバイスの研究を進めてきました。
布状アクチュエータの知見をもとに、McKibben型人工筋を衣服の表面に配置したデバイスで、McKibben型人工筋の収縮状態を制御することで多様な変形を生み出すことができます。そして、衣服変形に伴う体表面刺激により装着者に運動方向を知覚させます。私たちはこの新たな装着型デバイスで運動学習支援を実現することを目指しています。その前段階として、姿勢や動作のずれを装着者に気づかせ、修正させることのできる制御則を作り、評価を進めています。
研究詳細
1.布状アクチュエータ
McKibben型人工筋とは、空気圧を印加することで収縮するという特徴を持つアクチュエータ(エネルギーを物理的な運動に変換する装置)である。これ自体はあくまで伸び縮みすることしかできない。
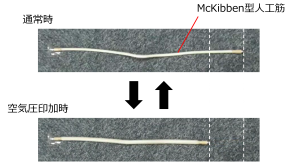
McKiben型人工筋が駆動する様子
布状アクチュエータとは、布にMcKibben型人工筋を組み込んだもので、人工筋の収縮状態を制御することで、前屈、側屈、回旋といった多様な変形を生み出すことのできるアクチュエータである。
J
2.衣服型デバイス(Funabot-Upper)
先行研究では、布状アクチュエータでの知見を衣服に適用したデバイスが開発された[1]。布状アクチュエータと同様にして衣服を変形させ、それに伴う体表面刺激を活用し装着者に運動方向を知覚させる。本デバイスは体幹・肩・肘・手首の計14の動作方向を知覚させることが可能である。

衣服型デバイスの外観
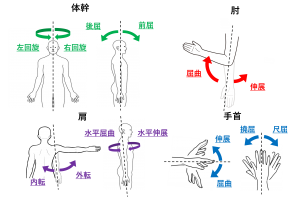
Funabot-Upperの対象14動作
本研究では、このデバイスを使用した複合動作での運動学習支援に向け、制御則の検討を進めている。
発表業績
・令和七年度 東海支部連合大会. 「細径人工筋による運動知覚提示に向けた前腕部での刺激位置と運動知覚の関係調査」.安田怜司,舟洞佑記,道木慎二(名古屋大学)
文献
[1]H. Fukatsu, R. Yasuda, Y. Funabora, and S. Doki, “Funabot-upper: Mckibben actuated haptic suit inducing kinesthetic perceptions in trunk, shoulder, elbow, and wrist,” 2025. [Online]. Available:https://arxiv.org/abs/2511.16265