
- 名前:
- Hao Rongjiao
- 学年/肩書:
- 卒業生
- 役職:
- 仕事部隊全般
- グループ:
- モータ
- 趣味:
- 研究,翻訳,ゲーム
研究テーマ / Research topic
永久磁石同期モータのセンサレス制御
永久磁石同期モータ位置・電流センサレス制御応用範囲拡大の検討
Research Theme
Study on Application Scope Extension of Permanent Magnet Synchronous Motor Position and Current sensorless control
キーワード / Keywords
永久磁石同期モータ,位置センサレス制御,電流センサレス制御,多相モータ
Permanent Magnet Synchronous Motor, Position sensorless control, Current sensorless control, Multi-phase Motor
| English ver. | 日本語版. |
a
1. 永久磁石同期モータ
永久磁石同期モータ(PMSM: Permanent Magnet Synchronous Motor)は、交流電圧によって駆動されるモータで、家電・電気自動車などで幅広く応用されている。回転子に永久磁石が取り付けられたPMSM は,励磁損失がない上に力率・効率の面で優れているといった特徴を持つモータである。永久磁石を用いることでモータの小形化高出力化が可能になるため,スペースや重量の制約の厳しいアプリケーションにおいては主にPMSM が用いられている。

PMSMの構造図(2極)
2. センサレス制御
PMSMの制御手法の一つとして,センサレス制御はPMSMドライブの汎用性を高める手法として広く知られている。センサレス制御では,PMSMの状態変数である磁石の位置と電流をセンサの代わりに推定器で推定することで,センサのコストと故障の問題を解決する。位置センサと電流センサにそれぞれ対応して,位置センサレス制御と電流センサレス制御の2つのカテゴリが存在している。
2.1 位置センサレス制御
PMSMをを望む高応答なトルク・速度・位置に制御するために,電流ベクトル制御手法が一般的に適用されている。その基本となる電流ベクトル分解に必要な回転座標系は,永久磁石の突極性の方向,つまり,回転子の位置により決定される。そのため,回転子磁極位置の検出のためのセンサ(位置センサ)として,一般的にレゾルバやエンコーダ等が使用される。しかし,家電製品や産業応用での実装条件によってはコストや断線リスクなどの課題が存在している。PMSMの可変速制御が要求される家庭用電化製品や自動車・鉄道の分野においては,高精度な電流ベクトル制御が必須になるため,これらは大きな問題となる。よって,位置センサを略し,制御器内部のソフトウェアを用いて電圧・電流信号から位置を推定することで,それを用いてベクトル制御を実現する位置センサレス制御が注目され,これまで数多くの研究がなされていた。
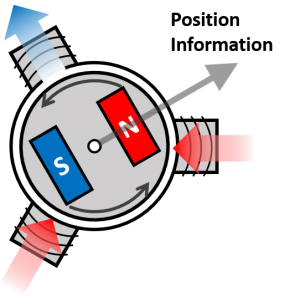
現在多く研究なされていた位置センサレス制御手法は,通常の電流ベクトル制御の性能にはわずかに劣るものの,電流ベクトル制御法の特徴である高速なトルク応答と高精度なトルク制御が可能であるため,信頼性の向上・装置の小型化・過酷環境下での使用などが期待され,様々なメリットから家電・産業応用分野において幅広く応用されている。回転子に永久磁石を組み込んだPMSM では,回転中にその磁石磁束が固定子巻線に鎖交することで励起される誘起電圧に磁石位置情報依存性があることから,それを利用することで位置推定を行える手法が一般的に利用されている[2]。本研究室では,全速度域を単一な拡張誘起電圧(EEMF : Extended ElectroMotive Force) 推定器で位置センサレス制御を実現する手法が考案されており[3],さまざまな運転状況においても良好な制御性能を示していた。

位置センサレス制御のシステム概要図
2.2 電流センサレス制御
位置センサを除いて,電流センサレス制御にとってもう一つ重要な計測備品は相電流センサである。一般的なPMSM電流ベクトル制御系においては相電流センサで測定した測定値を制御器にフィードバックすることでモータの電流状態を観測し,所望のトルクを発生させられるように制御を行う。しかし相電流センサは高精度であるほど,コストの増加が問題になるため,相電流センサを用いずに電流情報を取得する「電流センサレス制御」手法が多く検討されていた。
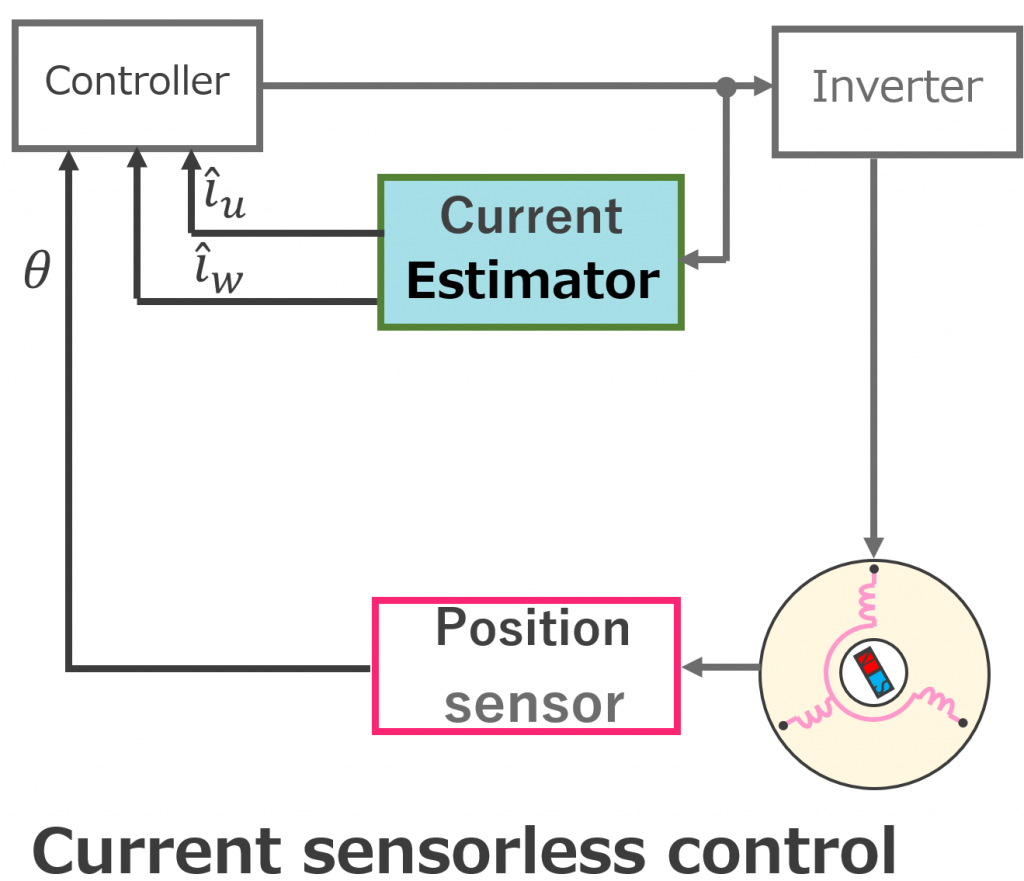
電流センサレス制御のシステム概要図
3. 本研究が着目する課題
昨今,特に電気自動車を中心としたモビリティ開発に伴い,これまでより広い動作範囲を持つ永久磁石同期モータが開発されている。これらのモータに対応できるように,より高応答・高ロバスト性を持つモータ制御手法が求められている。そんな中,上記で述べた位置センサレス制御・電流センサレス制御を対象とし,これらが応用可能な範囲を拡大するために,本研究で様々な検討を行っている。
3.1 位置センサレス制御の高応答化
PMSMの位置センサレス制御技術は既に実用段階にあるが,その過渡応答にはまだ課題が残っており,特に空転状態からの位置センサレス制御の起動が課題として挙げられている。電動コンプレッサなどのアプリケーションでは、消費電力軽減のために軽負荷領域ではモータ制御ループが起動・停止を繰り返す必要がある。このような制御ループが停止中でモータが空転している状態がフリーラン状態(空転状態)と呼ばれている。フリーラン状態からの起動時は,停止状態と異なり,制御ループ初期化処理には初期位置情報以外に初期回転速度情報も必要となる。よって,正確な初期速度情報と初期位置情報がない状態でインバータ電圧が初期化されると,インバータ電圧と回転速度により励起される誘起電圧が不一致となる。その電圧差分より,駆動回路正方向とは逆のモータ側からインバータ側への電流が発生する。
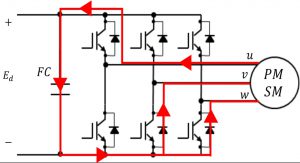
駆動回路で流れ込む逆流電流
従って,スイッチング開始以降初期速度と初期位置の両方を十分に推定しないと,適切な電流ベクトル制御が保証されず,電流が過大となり,最終的にインバータ破損などの故障を引き起こす可能性がある。このような過大電流を回避し,位置センサレス制御におけるフリーラン状態から起動する動作はFlying start やFlying restart とも呼ばれている。
このような動作を実現するためには,十分高応答な位置センサレス制御が必要になるが,従来研究は,通常の位置センサレス制御以外の制御手法による対処方法を検討しており,根本的に問題となる電流制御系内部の過渡状態については調査されていない。よって,本研究ではフリーラン状態からの起動時における電流制御系内部の過渡状態について調査することを踏まえて,起動性能を改善する対応策を提案することで,フリーラン状態を含めたあらゆる速度から起動可能な永久磁石同期モータの位置センサレス制御を提案した。[4][5][6]これらの成果は英文論文誌に投稿予定である。
3.2 二重三相PMSMのセンサレス制御
一方,センサレス制御の対象となるPMSMは大型移動体への応用が期待されており,モータのさらなる高出力化が求められている。しかし,三相PMSMは巻線の電流制限により出力が限界に近づいている。そこで,モータ巻線の巻数を増やし,三相と同じ電圧で高い総出力が期待できる多相モータが注目されている。特に二重三相PMSM(DTP-PMSM)はその中でも有力な候補である。実用化に向けて,DTP-PMSMドライブの汎用性を高めるセンサレス制御のニーズが高まっている。
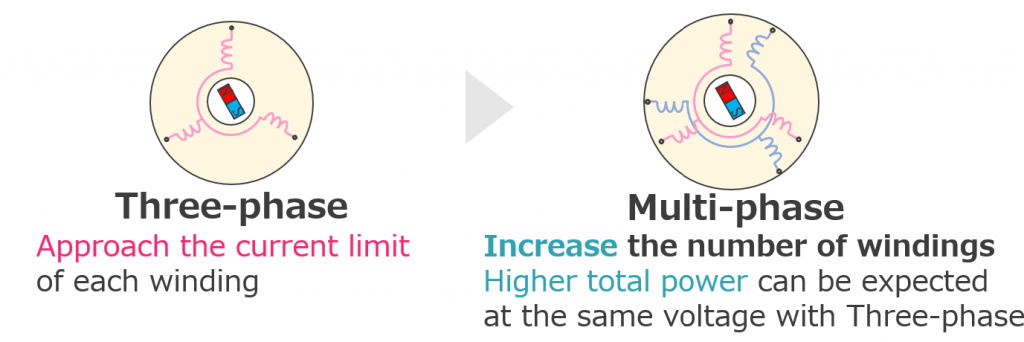
二重三相モータへのニーズ
本研究では,位置センサレス制御・電流センサレス制御を対象とし,二重三相PMSMにおけるセンサレス制御の実用化を目指している。
関連研究
[1]市川真士, 陳志謙, 冨田睦雄, 道木慎二, 大熊繁. “拡張誘起電圧モデルに基づく突極型永久磁石同期モータのセンサレス制御”. 電気学会論文誌D, Vol. 122, No. 12, pp. 1088–1096, 2002.
[2]二村 拓未, 道木 慎二: “信号重畳と速度により励起される拡張誘起電圧を利用した永久磁石同期モータの全速度域位置センサレス制御”, 電学論D, vol.140, No.8, pp.589-596
[3]近藤 翔太, 道木 慎二, 松本 純, 冨田 睦雄: “PMSM位置センサレス制御のための仮想誘起電圧に基づく制御用モデルに関する考察”, 電学論D, vol.139, No.1, pp.1-12
[4]R. Hao, K. Kitamura, S. Doki,“Performance Evaluation of Restarting from Free-running State in Position Sensorless Control of Permanent Magnet Synchronous Motor with Extended ElectroMotive Force”, 2021 IEE-Japan Industry Applications Society Conference, 3-23,2021.
[5]R. Hao, T. Kozakura and S. Doki, “Performance Evaluation of Startup and Driving Strategy at Overall Speed with Extended ElectroMotive Force for Position Sensorless Permanent Magnet Synchronous Motor,” 2022 International Power Electronics Conference (IPEC-Himeji 2022- ECCE Asia), Himeji, Japan, 2022, pp. 362-367, doi: 10.23919/IPEC-Himeji2022-ECCE53331.2022.9806847.
[6]R. Hao, S. Doki, K. Asahina and A. Ide, “Performance Evaluation of Position Sensorless Control System with Initial Speed Estimator for Overall Speed Startup,” 2023 25th European Conference on Power Electronics and Applications (EPE’23 ECCE Europe), Aalborg, Denmark, 2023, pp. 1-10, doi: 10.23919/EPE23ECCEEurope58414.2023.10264244.
English.ver
a
1. Permanent Magnet Synchronous Motor
PMSM: Permanent Magnet Synchronous Motor are motors driven by AC voltage and are widely applied in household appliances and electric vehicles. PMSMs, which are motors with permanent magnets attached to the rotor, with features such as no excitation losses and excellent power factor and efficiency. PMSMs are mainly used in applications with strict space and weight constraints, as the use of permanent magnets enables motors to be made smaller and with higher power output.
PMSM(2 ploes)
2. Sensorless Control
As one of the control methods of PMSM, sensorless control method is widely known for enhancing the PMSM drives’ versatility. In Sensorless Control, the state variables, magnet position and current can be estimated by Estimators instead of the sensors, solving the cost and failures issues of the sensors. Corresponding to the position sensor and current sensor respectively, Position sensorless control and Current sensorless control , two categories exist.
2.1 Position Sensorless Control
Field-Oriented Control techniques are commonly applied to control PMSMs to the desired high responsive torque, speed, and position. The rotational coordinate system required for the current vector decomposition, which is the basis of this method, is determined by the direction of the permanent magnet’s magnetic pole, i.e., the position of the rotor. For this reason, resolvers and encoders are generally used as sensors (position sensors) to detect the rotor pole position. However, depending on the mounting conditions in home appliances and industrial applications, there are issues such as cost and disconnection risk, etc. In the fields of home appliances, automobiles, and railroads, where variable speed control of PMSM is required, these are major problems because highly accurate Field-Oriented Control is indispensable. Therefore, position sensorless control, in which a position sensor is omitted and position is estimated from voltage and current signals using software inside the controller to realize Field-Oriented Control, has attracted attention and has been the subject of numerous studies.
Although the position sensorless control method, which has been the subject of much research at present, is slightly inferior to the performance of ordinary Field-Oriented Control, it is expected to improve reliability, reduce the size of equipment, and be used in harsh environments because it enables fast torque response and highly accurate torque control, which are the characteristics of the Field-Oriented Control method, and it has a wide range of applications in home appliances and industrial applications due to its various advantages. In PMSMs, the Back EMF excited by the magnetic flux chained to the stator winding during rotation is dependent on the magnet position information, and a position estimation method using this information is commonly used [2]. In our laboratory, a position sensorless control method using a single EEMF (Extended ElectroMotive Force) estimator for the entire speed range has been developed [3], and it has shown good control performance under various operating conditions.
The configuration of Position Sensorless Control
2.2 Current Sensorless Control
Aside from the position sensor, another important measurement fixture for Field-Oriented Control is the phase current sensor. In general PMSM Field-Oriented Control systems, the current state of the motor is observed by feeding back the measured values from the phase current sensor to the controller, which controls the motor to generate the desired torque. However, the higher the accuracy of the phase current sensor, the higher the cost becomes, and therefore, the “current sensorless control” method, which obtains current information without using a phase current sensor, has been considered in many cases.
The configuration of Current Sensorless Control
3. The issue discussed in this research
With the recent development of mobility, especially electric vehicles, permanent magnet synchronous motors with a wider operating range have been developed. In order to support these motors, motor control methods with higher response and robustness are required. In order to expand the range of application of position sensorless control and current sensorless control, as described above, various studies are being conducted in this research.
3.1 Improvment of transient performance of Position Sensorless Control
Although position sensorless control technology for PMSM is already in the practical stage, its transient response still poses challenges, especially the startup of position sensorless control from idle state. In applications such as electric compressors, the motor control loop must repeatedly start and stop in the light load region to reduce power consumption. The state in which the motor is idling while the control loop is stopped is called the free-run state (idle state). When starting up from the free-run state, unlike the stopped state, the control loop initialization process requires initial rotation speed information in addition to initial position information. Therefore, if the inverter voltage is initialized without accurate initial speed and position information, the inverter voltage and the induced voltage excited by the rotation speed will mismatch. From the voltage difference, a current is generated from the motor side to the inverter side, which is opposite to the drive circuit forward direction.
Inrush Current
Therefore, if both the initial speed and initial position are not sufficiently estimated after the start of switching, proper FOC cannot be guaranteed, resulting in excessive current that may eventually lead to inverter damage or other failures. To avoid such excessive current, the operation to start from the free-run state in position sensorless control is also called flying start or flying restart.
To achieve such operation, position sensorless control with sufficiently high response is necessary. However, previous studies have investigated control methods other than the usual position sensorless control, and have not investigated the transient state inside the current control system, which is the fundamental problem. Therefore, this study proposes a position sensorless control for permanent magnet synchronous motors that can start from any speed including the free-run state by proposing measures to improve the starting performance based on the investigation of the transient state inside the current control system during starting from the free-run state. [4][5][6] These results will be submitted to English-language journals.
3.2 Sensorless Control for Dual Three Phase PMSM
On the other hand, PMSMs, which are subject to sensorless control, are expected to be applied to large moving vehicles, and further increase in motor output power is required. However, three-phase PMSMs are approaching their output limit due to current limitation of the winding. Therefore, multiphase motors that increase the number of motor windings and can be expected to have a higher total output at the same voltage as a three-phase motor are attracting attention. In particular, the double three-phase PMSM (DTP-PMSM) is one of the most promising candidates. Toward practical application, there is a growing need for sensorless control to increase the versatility of DTP-PMSM drives.
Dual three phase PMSM
This research targets position sensorless control and current sensorless control, and aims at the practical application of sensorless control in dual three-phase PMSMs.
References
[1]Nakano, Takayoshi, “Vector Control of AC Motors”, Nikkan Kogyo Shimbun, 1996.
[2]M. Ichikawa, Z. Chen, M. Tomita, S. Michiki and S. Okuma, “Sensorless Control of a Butt Pole Type Permanent Magnet Synchronous Motor Based on Extended Induced Voltage Model”, IEEJ Transactions D, Vol. 122, No. 12, pp. 1088-1096, 2002.
[3]T. Nimura, and S. Doki, “Position Sensorless Control of IPMSM in Overall Speed Range by Extended EMF”, 21st European Conference on Power Electronics and Applications(EPE’19 ECCE Europe), Genova, Sept. 2019.
[4]R. Hao, K. Kitamura, S. Doki,“Performance Evaluation of Restarting from Free-running State in Position Sensorless Control of Permanent Magnet Synchronous Motor with Extended ElectroMotive Force”, 2021 IEE-Japan Industry Applications Society Conference, 3-23,2021.
[5]R. Hao, T. Kozakura and S. Doki, “Performance Evaluation of Startup and Driving Strategy at Overall Speed with Extended ElectroMotive Force for Position Sensorless Permanent Magnet Synchronous Motor,” 2022 International Power Electronics Conference (IPEC-Himeji 2022- ECCE Asia), Himeji, Japan, 2022, pp. 362-367, doi: 10.23919/IPEC-Himeji2022-ECCE53331.2022.9806847.
[6]R. Hao, S. Doki, K. Asahina and A. Ide, “Performance Evaluation of Position Sensorless Control System with Initial Speed Estimator for Overall Speed Startup,” 2023 25th European Conference on Power Electronics and Applications (EPE’23 ECCE Europe), Aalborg, Denmark, 2023, pp. 1-10, doi: 10.23919/EPE23ECCEEurope58414.2023.10264244.