
- 名前:
- 福岡 瑞規
- 学年/肩書:
- 卒業生
- 役職:
- したっぱ
- グループ:
- モータ
- 趣味:
- サッカー、テニス
研究テーマ / Research topic
電流制御を行う座標系が永久磁石同期モータのモデル予測制御に与える影響についての検討
モデル予測制御とは、制御対象の数式モデルを用いて、入力に対し対象の状態がどのようになるかを予測し、最適な入力を決定するという方法です。
モータの場合では、入力は電圧、対象の状態は電流です。
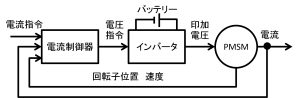
左図はモータの駆動システムです。電流指令、回転子位置・速度から電圧指令を決定し、インバータで印加電圧を生成しモータに印加することにより制御を行います。モータのモデル予測制御ではすべての電圧パターンに対して電流挙動の予測を行うことにより電流指令に最も近い電流挙動を選択し、選択した電流挙動が得られる電圧パターンを出力します。
モデル予測制御の流れは、以下のようになります。
- センサにより、電流、回転子位置・速度を取得
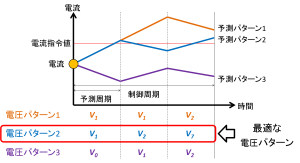
- モータの数式モデルを用い、すべての電圧パターンに対して、電流挙動を予測
- 評価関数を用い、最適な電流挙動を選択
- 選択した電流挙動が得られる電圧パターンを出力
- 固定座標系・回転座標系
現在のモデル予測制御は回転座標系という座標系を用いて行われています。
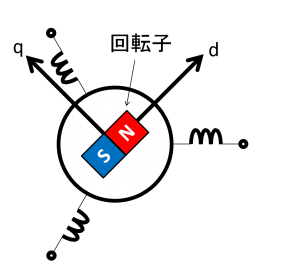 回転座標系とは左の図のように、モータの中の回転子と呼ばれる磁石のN極の向きをd軸、d軸と垂直な向きをq軸とした座標系のことです。回転子に応じて座標軸も回転するので回転座標系と呼ばれます。この回転座標系に対して、固定座標系というものもあります。
回転座標系とは左の図のように、モータの中の回転子と呼ばれる磁石のN極の向きをd軸、d軸と垂直な向きをq軸とした座標系のことです。回転子に応じて座標軸も回転するので回転座標系と呼ばれます。この回転座標系に対して、固定座標系というものもあります。
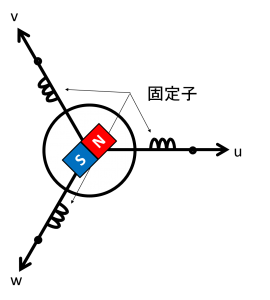 固定座標系とは固定子と呼ばれるモータについているコイルを基準にした座標系のことです。
固定座標系とは固定子と呼ばれるモータについているコイルを基準にした座標系のことです。
それぞれの座標系の特徴について下の表にまとめます。
| メリット | デメリット | |
| 回転座標系 | 電流を直流で扱うことができる | 電流を座標変換する必要がある |
| 固定座標系 | 電流を座標変換する必要がない | 電流を交流として扱う必要がある |
固定座標系はモータの構造を基準としているので、取得した電流をそのまま扱うことができます。しかし扱う電流は交流となるので電流の振幅や周波数を適切に決定する必要がある。
回転座標系は座標軸が回転しているので電流の振幅のみを扱えばよい。しかし、電流を座標変換する必要があるので誤差などが生じる可能性がある。
私の研究では回転座標系で行われていたモデル予測制御を固定座標系でも行いそれぞれの座標系でどのような性能になるかを比較し、検討することが目的です。