- 名前:
- 吉田 恭介
- 学年/肩書:
- 卒業生
- 役職:
- 情報管理部隊
- グループ:
- モータ
- 趣味:
- 食、旅行、サッカー
- 一言:
- 日立製作所からの受託研究員として一年間お世話になっております。
研究テーマ / Research topic
自動ソースコード生成・コア割り付けツールをモータ制御に適用した際の有用性評価
研究背景・目的
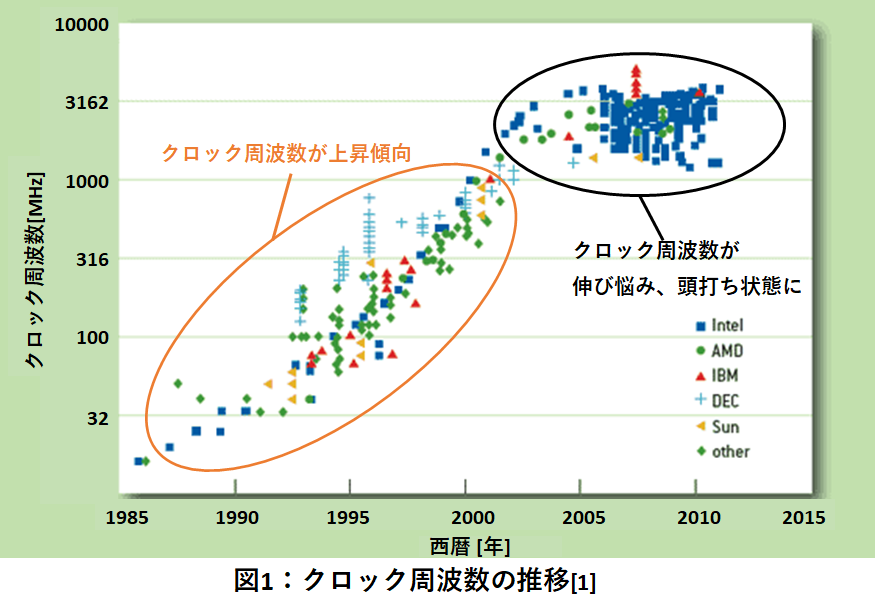
現在まではCPUのクロック周波数を上昇させることで計算能力を向上してきた。(図1参照)しかし、これ以上のクロック周波数の増加は困難であり、消費電力削減などの要求から、クロック周波数を上昇させることでの計算性能向上ではなく、マルチコアを用いた計算性能向上を目指す動きがとられている。しかし、マルチコアを用いた高性能計算機を使用する場合、それぞれのコアの仕事量が均等になるように作業者の手で割り付ける必要があり、高性能計算機を使用する上で、作業者の割り付け作業の負担を軽減したいという要求がある。そこで開発されたのが自動ソースコード生成・コア割付ツールである。このツールは、今まで作業者の手で行っていたソースコードの割付作業を自動で行えるため、作業者の負担軽減につながる。このツールを時間管理が厳格なプログラムである組込システムのモータ制御に適用し評価をおこなっていく。
モータ制御システム
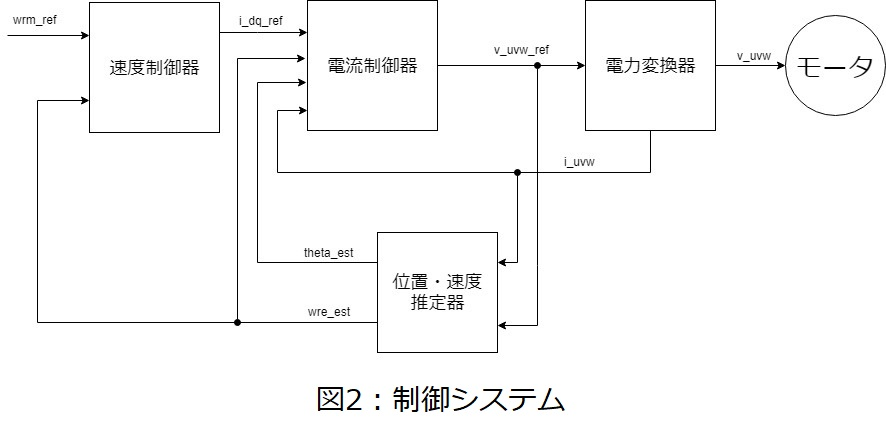
モータ制御システムを図2に示す。本研究では位置センサレス・電流センサレスベクトル制御システムを並列化し評価をおこなっていく。また研究対象のモータはPMSM(永久磁石同期モータ)である。各制御方法を下記に記す。
1.ベクトル制御
1.ベクトル制御
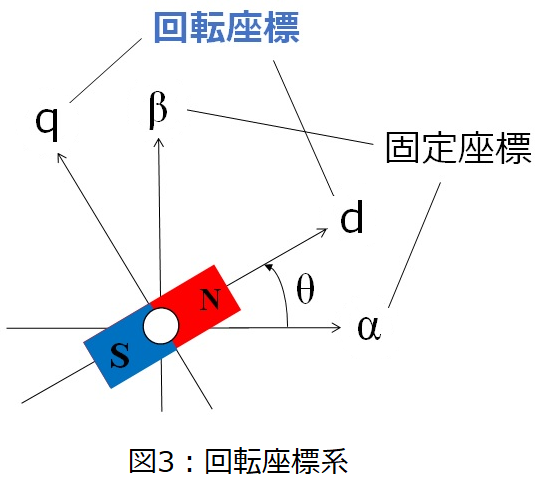
ベクトル制御とは図3のような回転座標系(d-q軸)で制御する制御方法であり、固定座標系(α-β軸)では交流にて制御をおこなう必要があるのに対して、回転座標系では制御系を直流成分にて制御をおこなうことができる。また電流を磁束を制御する成分(d軸)とトルクを発生する成分(q軸)に分解することができ、それぞれの電流成分を独立に制御することができる特徴を持つ。
2.電流センサレス制御
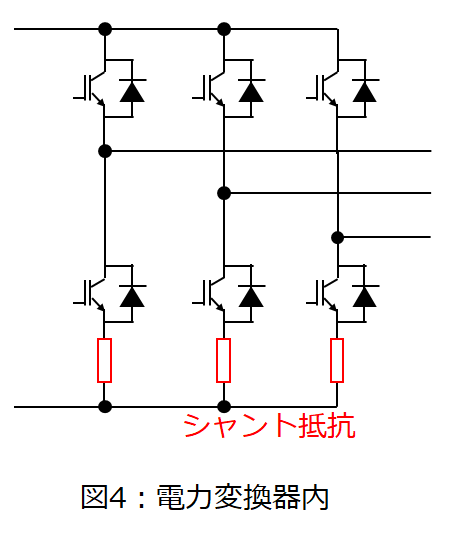
電流センサレス制御とは電流センサを用いず、電流再現器によって電流を再現することによってモータを制御する方法である。本研究で用いた電流センサレス手法はインバータの過電流検出用に内蔵されているシャント抵抗に流れる直流電流を用いて交流電流を再現する手法である。
3.位置センサレス制御
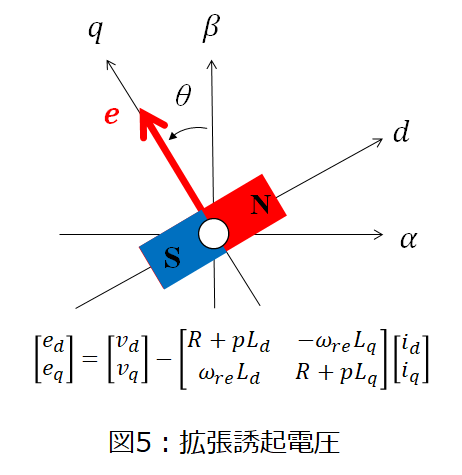
位置センサレス制御とは位置センサを用いず、拡張誘起電圧から位置を推定しモータを制御する手法である。拡張誘起電圧とはモータが回転することによって発生する誘起電圧のもつ位置情報を1つのベクトルに集約したものである。拡張誘起電圧ベクトルは電圧、電流、抵抗、インダクタンスなどのモータパラメータから求めることができる。
今後の取り組み
現在までに上記で記述した位置センサレス・電流センサレスベクトル制御を対象モータに適用し、シングルコアでの制御性能の評価をおこなった。今後はこの制御プログラムを自動ソースコード生成・コア割付ツールを使用し並列化をおこない、マルチコア制御性能評価をおこなっていく予定である。
出典一覧
[1] acmqueue「CPU DB: Recording Microprocessor History」 https://queue.acm.org/detail.cfm?id=2181798