研究テーマ / Research topic
手指の操作技能伝達のためのロボットハンド-グローブシステムの提案
| English ver. | Japanese ver. |
// ここに本文を記入(英語)19E
研究背景
手指のリハビリテーションを目的としたグローブ型装着デバイスが研究されている。グローブ型装着デバイスは、掌や手の甲に配置したアクチュエータを駆動して手指の関節部にトルクを発生させることで、屈曲・伸展運動を補助するデバイスである。
我々は、グローブ型装着デバイスを人の手を模擬した骨格に装着することで、人の手指と同様に駆動するロボットハンドとして転用できる可能性に気づき、検討を進めている。グローブ型装着デバイスに内蔵する骨格の剛性や形状を変更することで、ロボットハンド全体の特性を様々に変更できると考えられる。ロボットハンドで操作する物体の硬さや重さに合わせて骨格を変更することにより、幅の広い物体の操作が行えると期待できる。
四指の屈曲・伸展運動を補助するグローブ型装着デバイスを試作、3Dプリンタで製作した駆動機構を有さない手型の骨格に装着することでロボットハンドとする。
グローブ型装着デバイス内部の手型骨格の構造を変化させることによるロボットハンドの把持性能の変化について調査している。
ロボットハンド構成
 |
 |
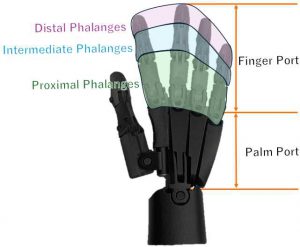 |
ロボットハンド(図1)は、グローブ型装着デバイス(図2)を駆動機構を有さない手型骨格(図3)に装着する構成を持つ。
発表業績一覧
山下祐輔, 舟洞佑記, and 道木慎二. “細径人工筋で能動化したグローブ型装着デバイスのロボットハンドへの転用.” ロボティクス・メカトロニクス講演会講演概要集 2024. 一般社団法人 日本機械学会, 2024.
山下祐輔, 舟洞佑記, and 道木慎二. “手型骨格とグローブ型装着デバイスから成る\\ロボットハンド実現に向けた骨格構造と把持性能の調査.” 計測自動制御学会システムインテグレーション部門講演会講演概要集 2024. 計測自動制御学会, 2024.