研究テーマ / Research topic
モータ駆動システムへのモデル予測制御の適用による高性能化に関する研究
■モータ駆動システムへのモデル予測制御の適用と有効性
モデル予測制御(MPC:Model Predictive Control)に基づくモータ制御では未来のモータ挙動の予測と評価により最適な印可電圧を決定する.一般的に利用されている制御法(一般法)に比べ,図1のように駆動範囲の拡大とトルクの高速応答化が可能である.移動体などにおいてはモデル予測制御の適用により運転性能や安全性の向上が可能となる.
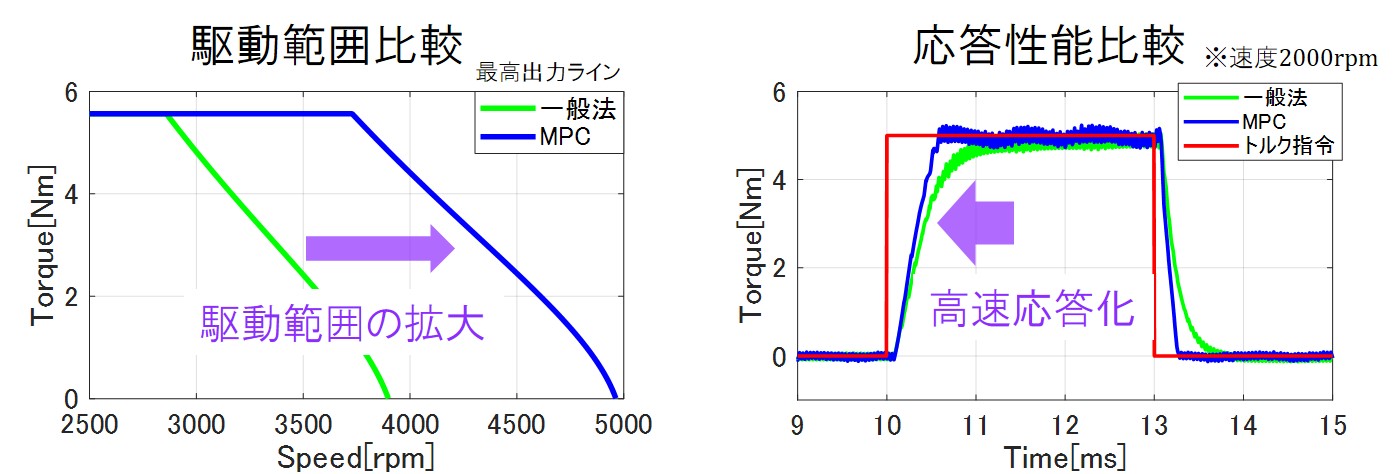
図1:モデル予測制御の有効性
以降モデル予測制御やモデル予測制御によるモータ制御,現在・過去の取り組みについて各リンクに記載.
■モデル予測制御とは
モデル予測制御とは,制御対象のモデルを用いて挙動を予測し最適な挙動となる操作量(入力)を決定する制御法である.
図2に示すように,制御器は考えられる入力(u)に対し対象のモデルより出力挙動(y)を予測する.予測結果の中から指令(r)に最も追従する予測結果を最適な応答とし,その応答に対応する入力を実際に対象に入力する.入力に対する要求や機器の制約を考慮したうえで最適な解を決定することができるうえ,制御器の調整が容易で直感的という特徴を有する.
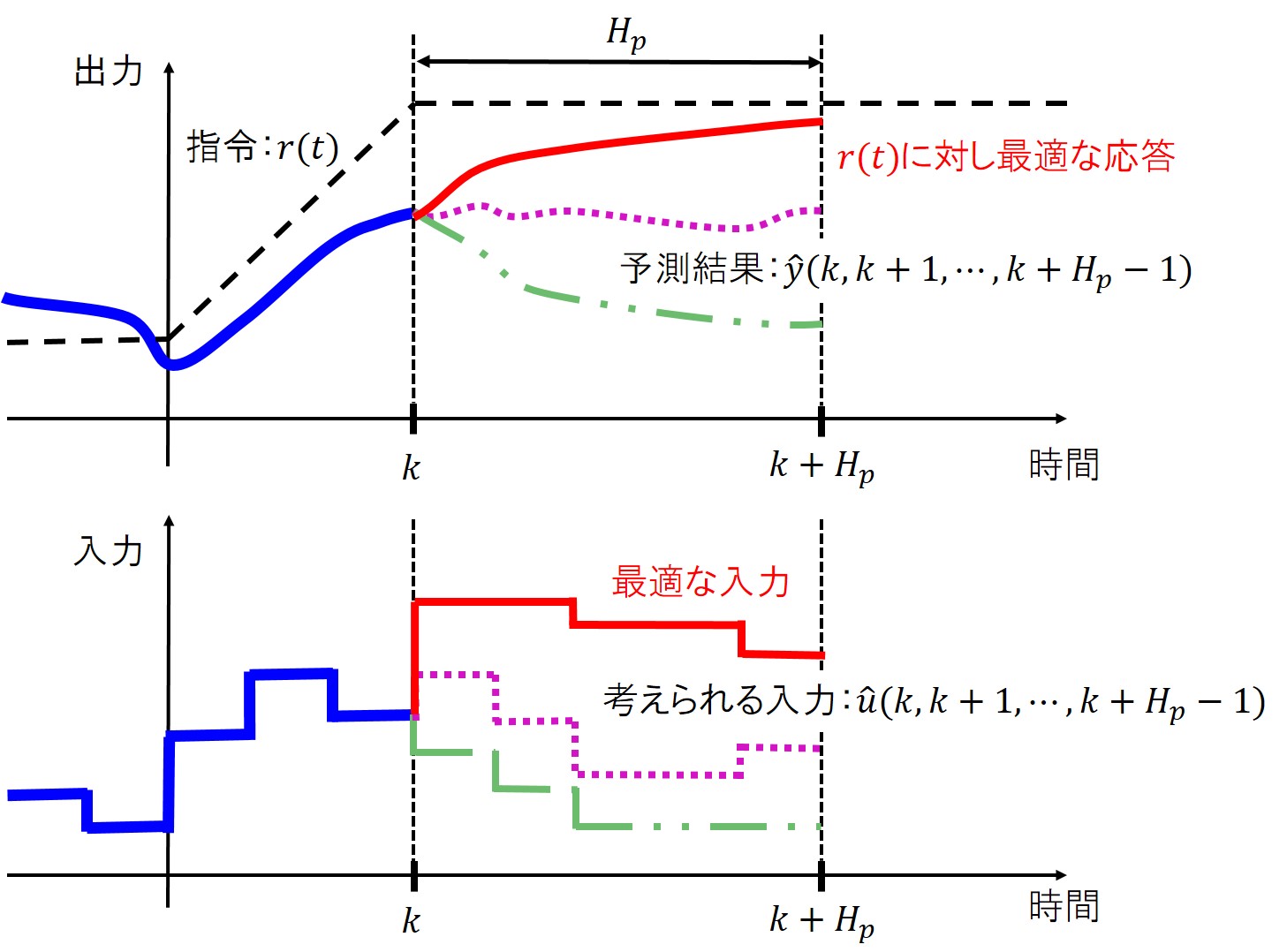
図2:モデル予測制御の流れ
■モータ駆動システム
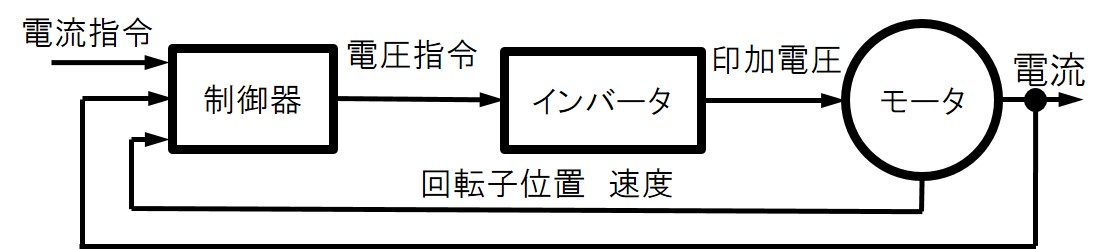
図3:モータ駆動システム
モータ駆動システムの構成を図3に示す.各構成要素について詳細を下記に記す.
制御器
モータの情報(電流,回転子位置,速度)と電流指令から駆動に必要な電圧指令を計算する.一般法では,電流指令とモータの電流の誤差から必要となる電圧指令(交流)の振幅を決定する.
インバータ
図4のように制御器が計算した電圧指令(交流)に対し,素子スイッチのON/OFFにより疑似的に電圧指令を再現する印可電圧を生成する.
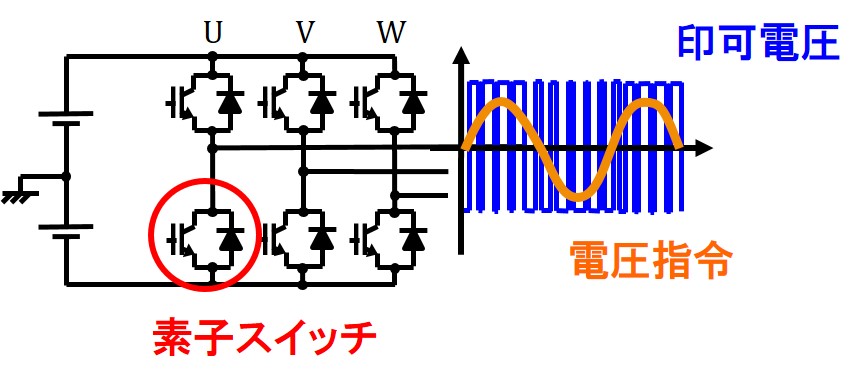
図4:インバータ
■モデル予測制御によるモータ制御
モデル予測制御では図5のようにインバータの瞬間的な状態が8通りであることに注目している.
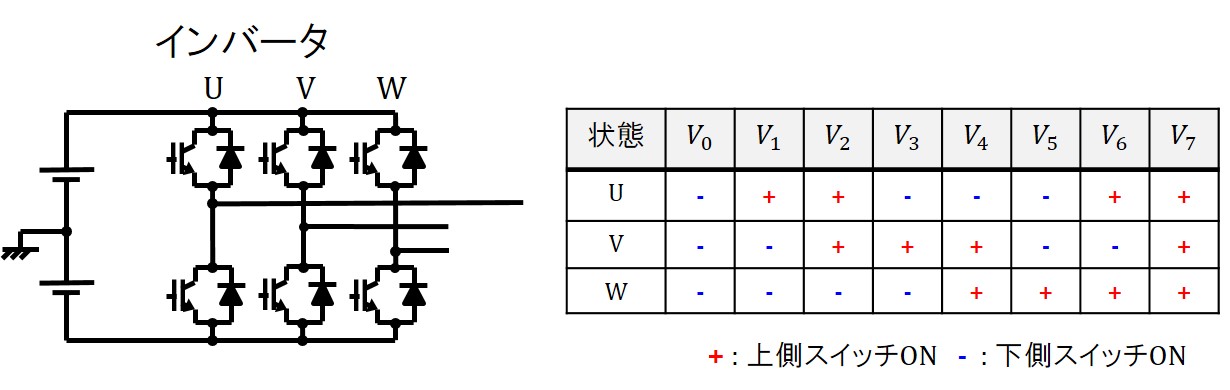
図5:インバータと状態
モータへの印可電圧はこの8通りの状態の組み合わせである.そこでモデル予測制御では図6のように考えられる組み合わせに対しモータの未来の電流挙動を予測する.予測された電流挙動と電流指令を比較し,最も誤差の小さい挙動を最も追従した挙動として選択し、その挙動となる組み合わせを最適解として印可電圧とし,実際にモータに印可する.
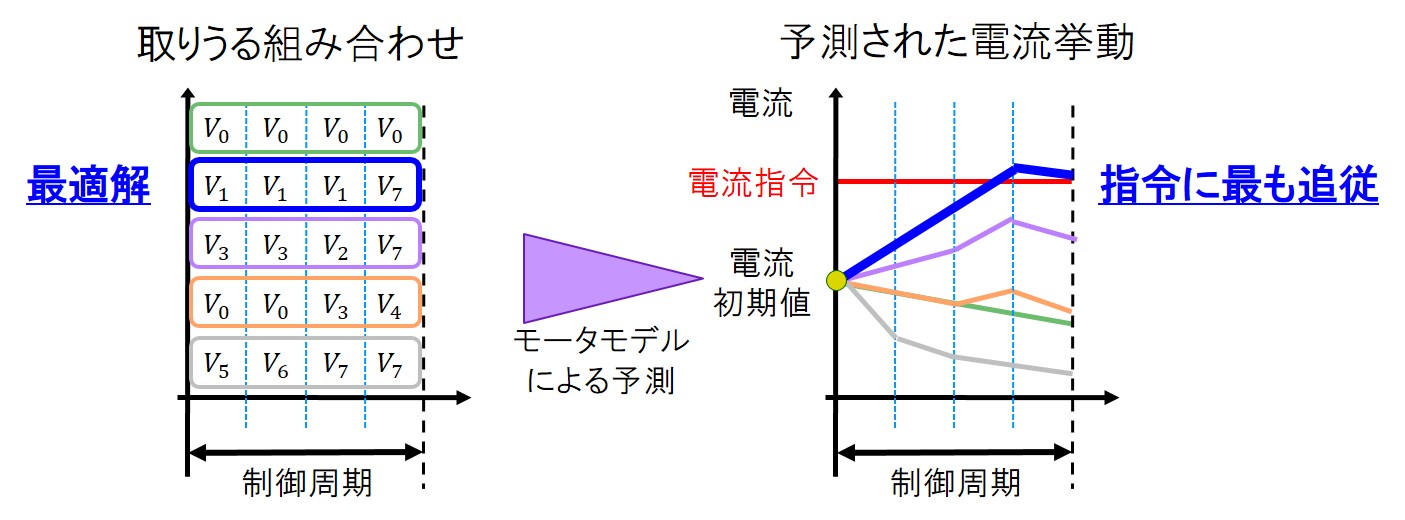
図6:電流挙動の予測と最適解の探索
このようにモデル予測制御では,印可電圧を電流挙動の予測と評価により直接決定する.一般法と異なるアプローチで印可電圧を決定することで駆動範囲の拡大やトルクの高速応答化を実現できる.
■取り組み
私はモデル予測制御の実現に向けて下記内容を検討している.
モデル予測制御の実装
- 線形駆動における制御性能評価(2015/04-2015/08)
- 過変調駆動における制御性能評価(2016/01-2016/12)
- モデル予測制御のテーブルによる実装法の検討(2018/05 – )
モデル予測制御の設計指針作成
モデル予測制御における計算量削減
■Applying Model Predictive Control for Motor Drive System and its effectiveness
In motor control based on Model Predictive Control (MPC), the controller determines optimum input voltage by predicting future current behaviors and evaluating these behaviors. MPC can realize expanding operation range and fast torque response compared with general control methods, such as Field Oriented Control (FOC) (Fig. 1). Driving performance and safety of automobile such as HEV and EV can be improved by applying MPC.
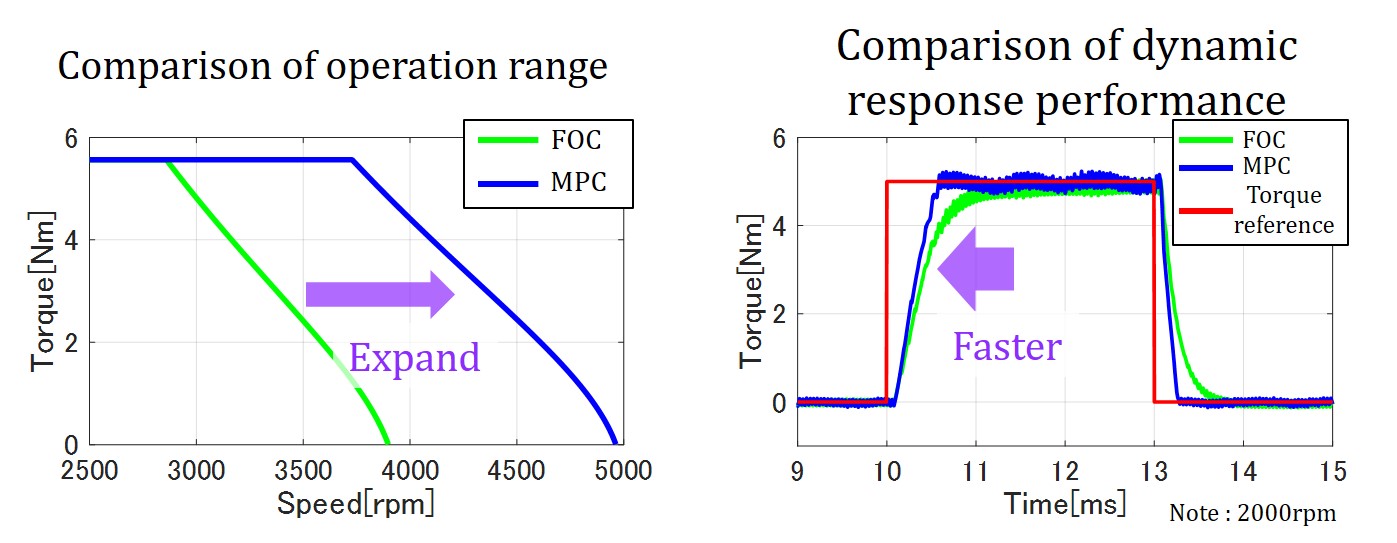
Fig.1 Effectiveness of MPC
MPC, Motor Control based on MPC and research activities until now are shown below.
■What is MPC
MPC is one of control method that controller predicts plant behaviors using mathematical model of control object and determine input which behavior is optimum for reference.
Fig. 2 shows the control flow by MPC. The controller predicts output behaviors ( y ) using mathematical model for considerable input ( u ). Then, it selects optimum input which most follow the reference ( r ) from prediction results. MPC has these characteristics, user can consider requirements for inputs and constraint of object in prediction and adjustment of controller is intuitive and easy.
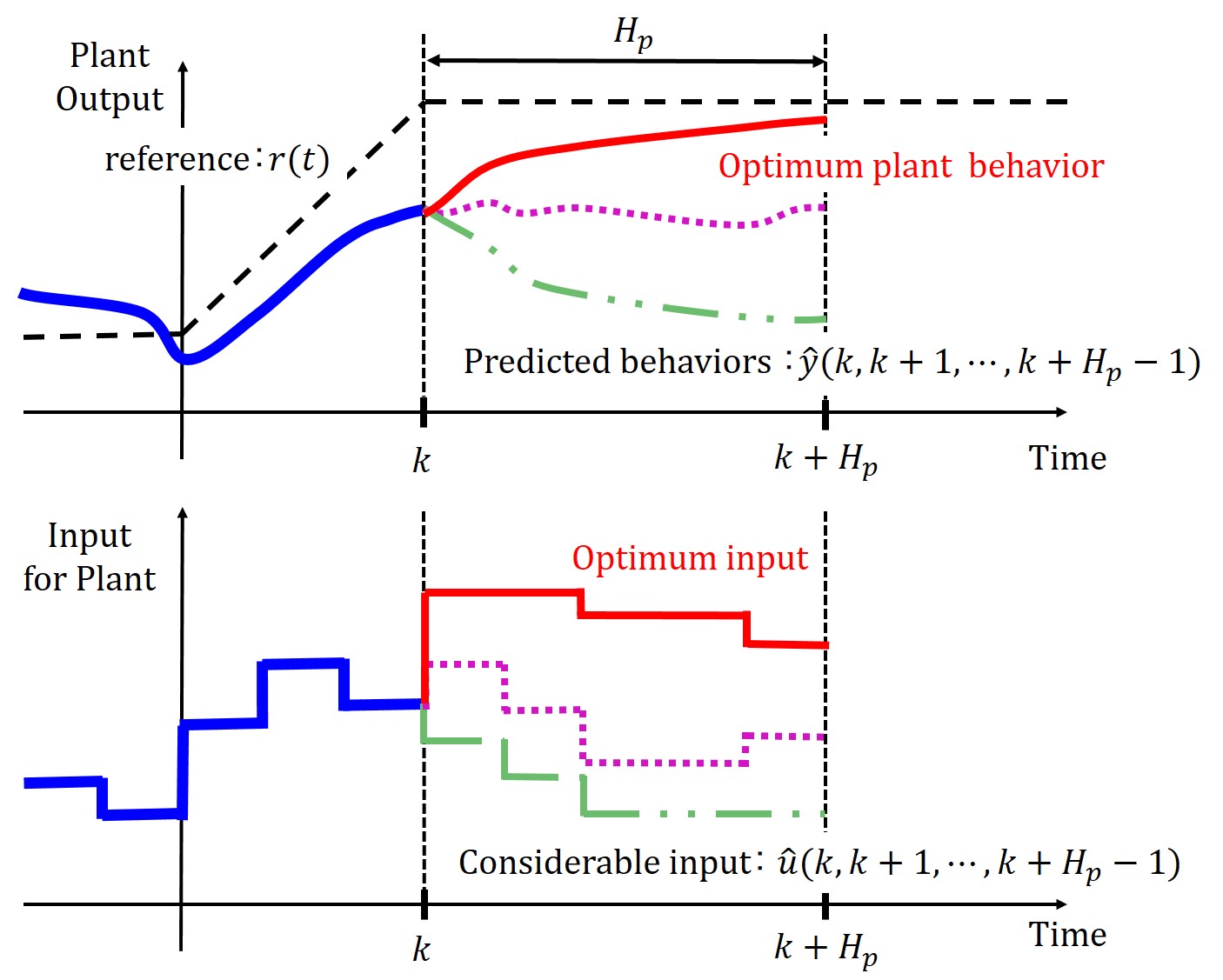
Fig.2 Control Flow of MPC
■Motor Drive System
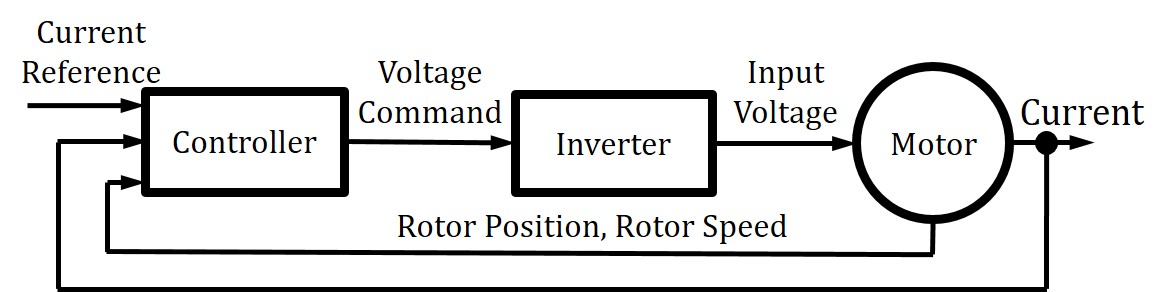
Fig.3 Motor Drive System
Fig.3 shows motor drive system. Details of some components is describe below.
Controller
It calculates voltage command for inverter from motor information (motor current, rotor position, rotor speed) and current reference. In FOC (Field Oriented Control), controller determines amplitude of voltage command from the error between current reference and motor current.
Inverter
Inverter generates Input pulse voltage which reproduce voltage command in a pseudo manner by switching like Fig. 4.
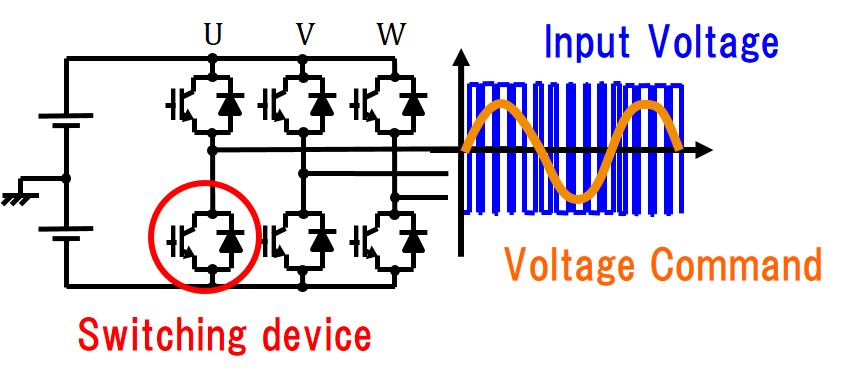
Fig.4 Inverter
■Motor Control based on MPC
In applying MPC for motor drive system, it is focused on that switching state of inverter is 8 different states.

Fig.5 Inverter’s Switching states
Input voltage for motor is permutations of these 8 different states. Therefore, Controller make considerable permutation like Fig.6. and predicts future current behaviors for each permutation. Controller evaluate which future behavior is most follow current reference by comparing the error of behaviors and current reference. Controller determines optimum permutation as input voltage and then, input to motor.
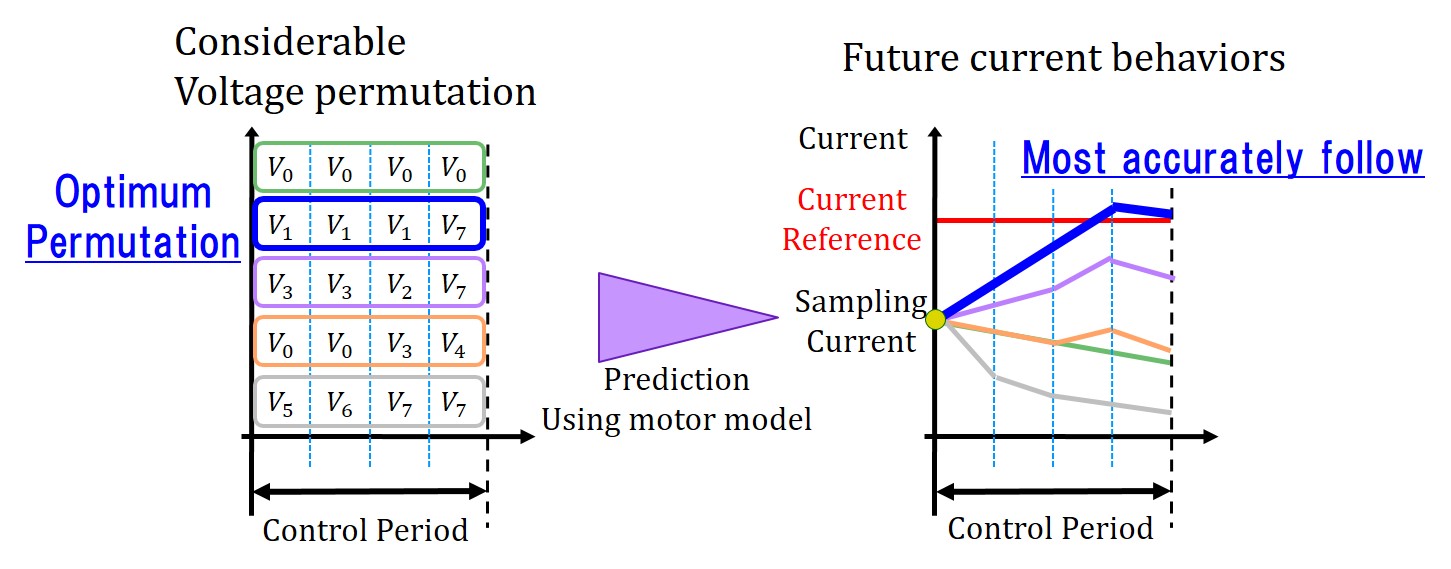
Fig.6 Control flow of Motor based on MPC
In MPC, Input voltage is determined directly by predicting future current behaviors and evaluating. MPC can realize expanding operation range and faster torque response.
■Research Activities
I’m studying these contents for implementation of MPC.
Implementation of MPC
- Performance evaluation in liner region(2015/04-2015/08)
- Performance evaluation in overmodutation region(2016/01-2016/12)
- Study about implementation methods of MPC by using LUT(2018/05 – )
Controller Design Method of MPC
Calculation Amount Reduction of MPC