研究テーマ / Research topic
高速域における不安定現象を改善したパラメータ同定機能を有する誘導モータベクトル制御
ap
研究背景
誘導モータ(IM)は安価,レアアースを用いない等のメリットを有していることから,産業機器や鉄道をはじめとした幅広い分野で利用されています。IMの高性能・高効率な制御には,抵抗やインダクタンスといったモータパラメータが必要となります。一般的には,直流試験や無回転試験,拘束試験等によって特定の動作点のパラメータを測定する方法が主流です。しかし,これらの測定法は特定の動作点でのパラメータを個々に求めているに過ぎません。
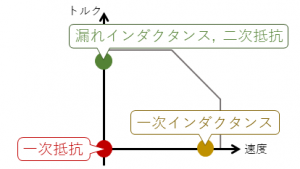
電動化が進む移動体分野においては,磁気飽和を積極的に利用した高出力密度化が行われており,結果として動作点に依存したパラメータ変動が大きくなる傾向にあります。また,高速化による出力拡大も行われています。そのため,高速域も含む全動作点での高効率・高応答の制御を実現するためには,各動作点でのパラメータ同定が必要となります。これを実現するために、これまでにも様々なパラメータ同定法が提案されています。
ap
研究目的
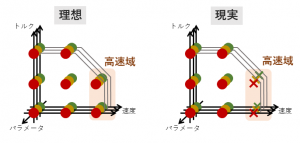
これまで提案されてきたパラメータ同定法は,産業用途でよく用いられる数千rpmを対象としており,高速域で不安定化する問題が存在します。本研究では,高速域におけるパラメータ同定の不安定化の原因を明らかにし,その解決を目指しています。
ap
パラメータ同定原理
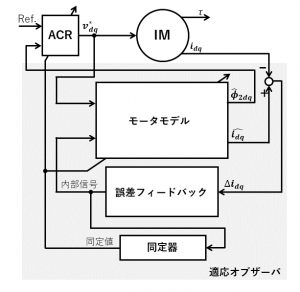
パラメータ同定は,IMのベクトル制御に必要な二次磁束オブザーバを用いて行われており
1. 制御対象であるIMと制御対象を表すモデルに同一電圧を印可
2. 制御対象のパラメータとモデルのパラメータに差があった場合,出力電流に差が発生
3. 出力電流の差に対して誤差フィードバック処理した内部信号を演算
4. 内部信号を用いてパラメータ同定
という構成です。
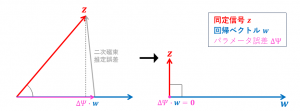
同定器内では,内部信号から同定したいパラメータ誤差を分離するために回帰ベクトルを計算し,内部信号と回帰ベクトルの内積を取ることでパラメータ同定しています。
以上の原理を用いたパラメータ同定手法は多く存在しますが,本研究ではT-I形等価回路に基づく適応スライディングオブザーバを用いた漏れインダクタンス同定に着目しています。
ap
現在の取り組み
本研究では,回帰ベクトルの位相に着目し,高速になるにつれて回帰ベクトルの位相ずれが発生することにより,同定が不安定化していることを明らかにしました。そして,回帰ベクトルのずれは離散的な座標変換による電圧誤差により発生していること解明しました。
これは,電流制御時に問題となる座標変換時の軸ずれ問題と同種であり,高速域でのパラメータ同定において一般的に生じさせる可能性があります。これに対して,高速駆動時の電流制御の軸ずれ問題と同様の対策により,高速域での同定の不安定化を解消可能であることを検討しています。