研究テーマ / Research topic
二重三相PMSMの弱め界磁制御と過変調領域の併用手法において実用化に向けた性能評価
研究背景
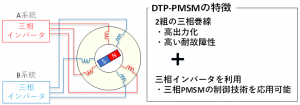
永久磁石同期モータ(Permanent Magnet Synchronous Motor : PMSM)は小型・高出力・高効率という利点から産業用機械や自動車、家電製品などのアプリケーションに広く利用されています。ここで従来の三相PMSMと比べて多くの相を持つ多相PMSMは、相電流の制限を緩和することによる高出力、1相が故障しても残る相で駆動可能である冗長性から電気船舶や電動航空機, 電気自動車などの業界で注目されています。なかでも二重三相PMSM(Dual three phase PMSM : DTP-PMSM)は二組の三相巻線を一つの固定子に収めたモータであり、既に普及されている三相インバータを用いて駆動可能であることから三相PMSMの培われた制御技術を継承可能という特徴を有しています。下図にDTP-PMSMの内部構成と特徴を示します。
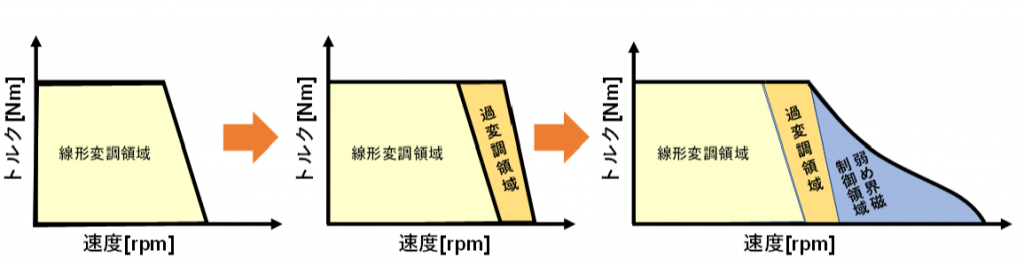
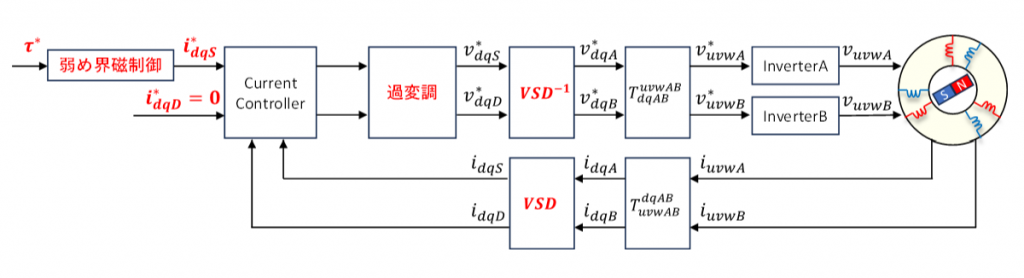
多相PMSMの制御法として,基本波成分と高調波成分を分解し,独立に制御するベクトル空間分解 (Vector Space Decomposition:VSD) 制御が知られており、この制御法によりDTP-PMSMの運転範囲を拡大するための過変調の利用が提案されました。また、以前より三相PMSMにて高速運転時の性能を向上させるための弱め界磁制御が提案されています。これらの研究から先行研究にて両者を併用しDTP-PMSMの運転範囲を拡大する提案と実機実験による検証がなされました。下図に弱め界磁制御と過変調併用による運転範囲拡大と先行研究で提案された電流制御系駆動システムを示します。
しかし、上記研究内容はあくまで原理的な確認のための限定的な検証に留まります。したがって、本研究では提案手法の実用化へ向け、様々な性能評価を行うことで提案手法の妥当性を検討し実用化への貢献を行います。
現在の取り組み
先行研究では、制御器と実機のパラメータが一致の下で実験が行われましたが、実用化においてモータパラメータは周囲環境によりリアルタイムに変化します。これによって、制御器と実機にパラメータに誤差が生じると、十分に弱め界磁制御がなされず運転範囲が縮小されると考えられます。したがって、本研究では提案手法のパラメータ誤差に対するロバスト性を確認することで、どれほどの誤差ならば許容できるのか調査を行います。