研究テーマ / Research topic
位置センサレスによる永久磁石同期モータの位置決め制御の精度改善に向けたモータモデルの検討
キーワード
永久磁石同期モータ, 位置センサレス制御, 位置決め制御, 磁気飽和
研究背景
永久磁石同期モータ(PMSM)は小型,高効率,高出力といった優れた特徴を有していることから,産業用機械や電気自動車,ロボット,家電製品などの業界で幅広い範囲で応用されています。
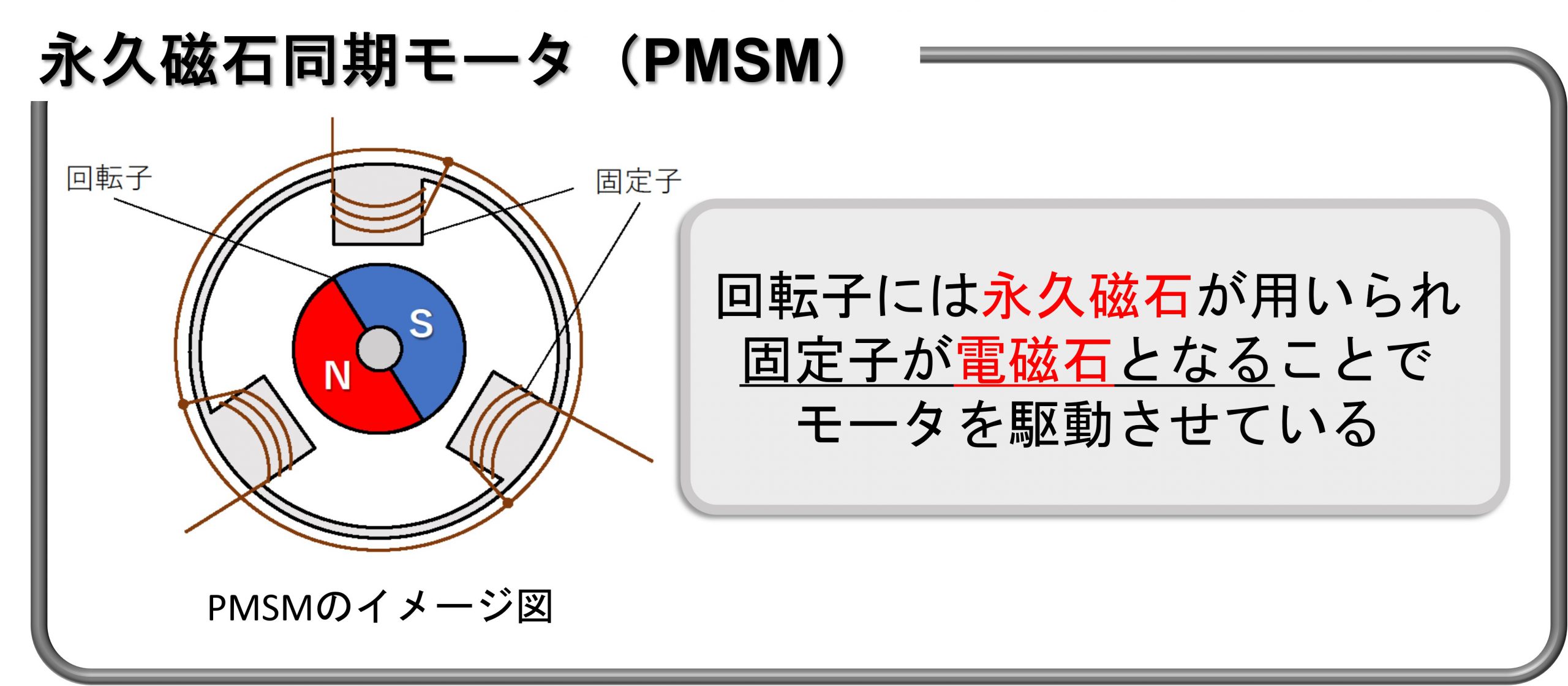
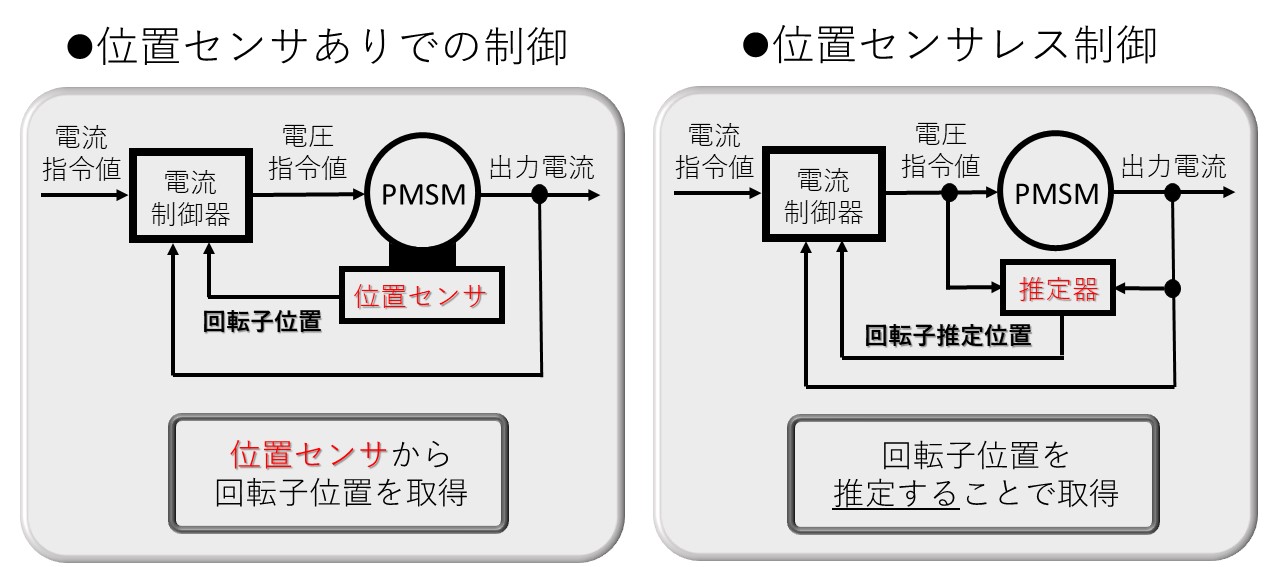
PMSMの制御では一般的に回転子位置(回転子の磁石方向)に基づいてモータに電流を流すため、回転子位置を取得することは必要不可欠です。そのため、PMSMには回転子位置を取得するために位置センサが取り付けられています。
しかし、位置センサは比較的高価であり、設置スペースが必要、環境によっては振動や衝撃、温度変動から位置センサが故障してしまい制御不能に陥る可能性があります。これらの問題から、位置センサを用いずに回転子位置を推定することで制御する位置センサレス制御が数多く提案されており、既に実用化されているアプリケーションも存在します。
PMSMには位置決め制御に用いられるアプリケーションがあります。位置決め制御ではその名の通り回転子位置を制御するため、モータを駆動させるために必要な回転子位置の情報よりもさらに正確な情報が必要となります。
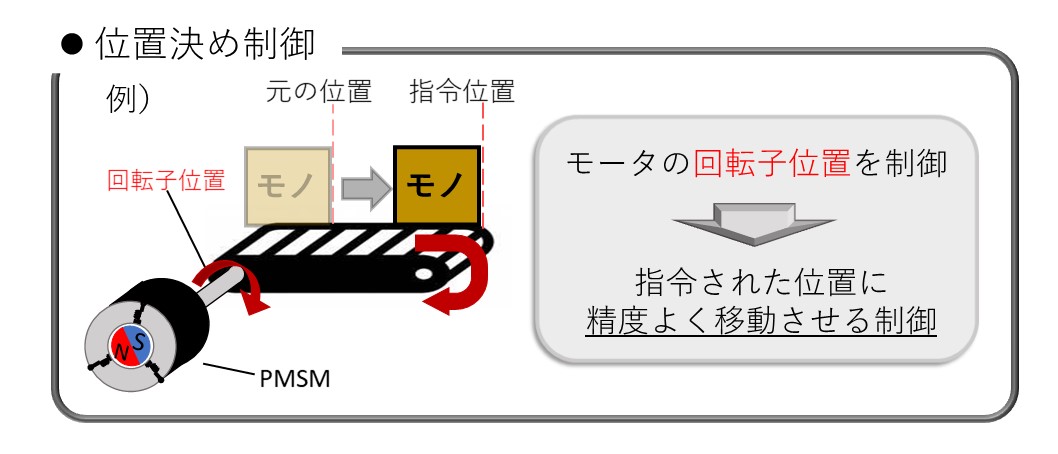
位置センサレス制御で位置決め制御を行うには、求められる回転子位置の推定精度をまだまだ満たせていません。したがって、位置センサレス制御において回転子位置の推定精度の向上は、位置センサレス制御の適用範囲拡大に向けて大きな課題と言えます。
研究目的
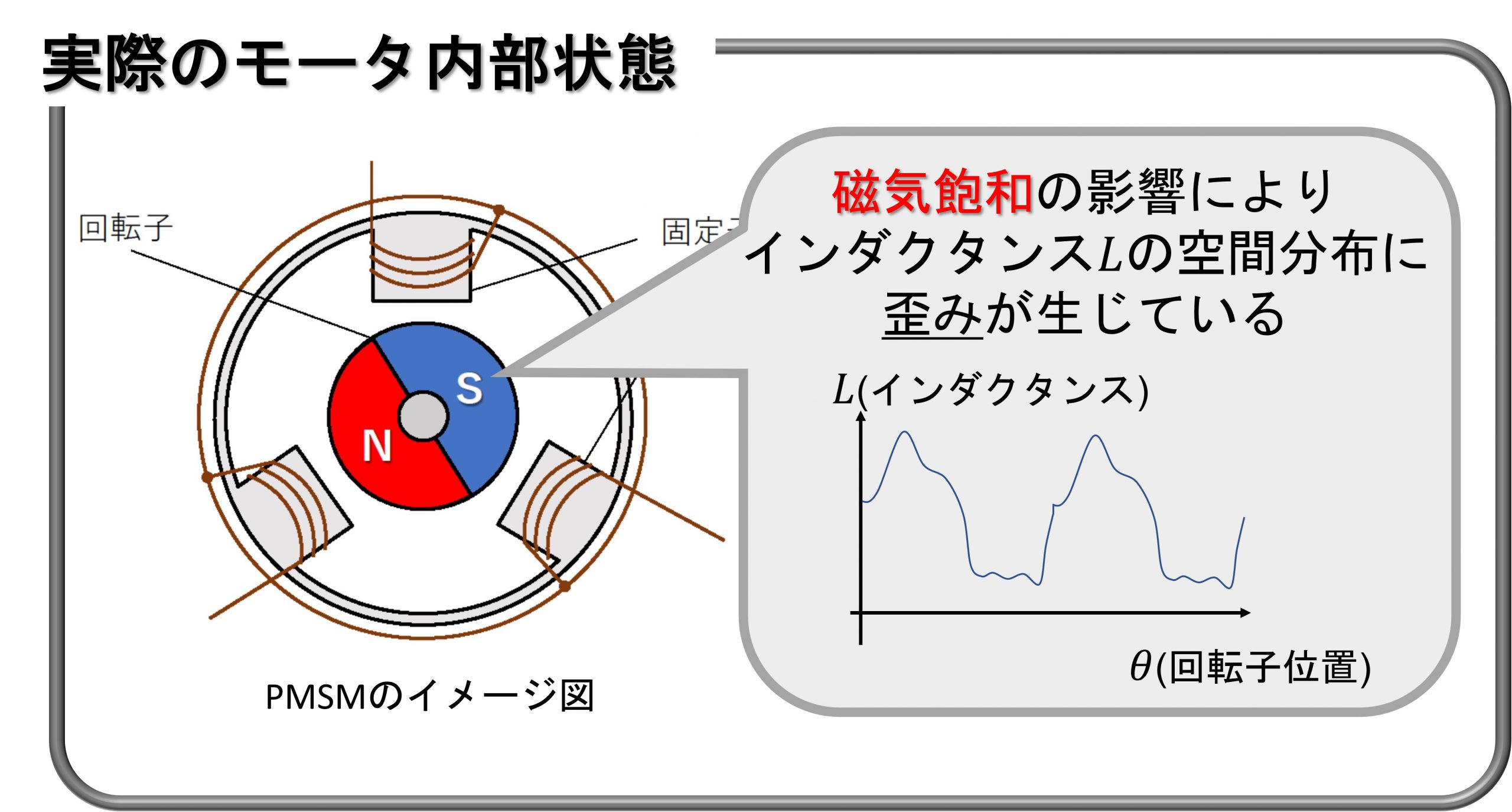
低速域での位置センサレス制御手法では、一般的にモータ内部のインダクタンスLが回転子位置θに対して正弦波状に分布しているという前提をした数式モデルを用いて回転子位置を推定しています。
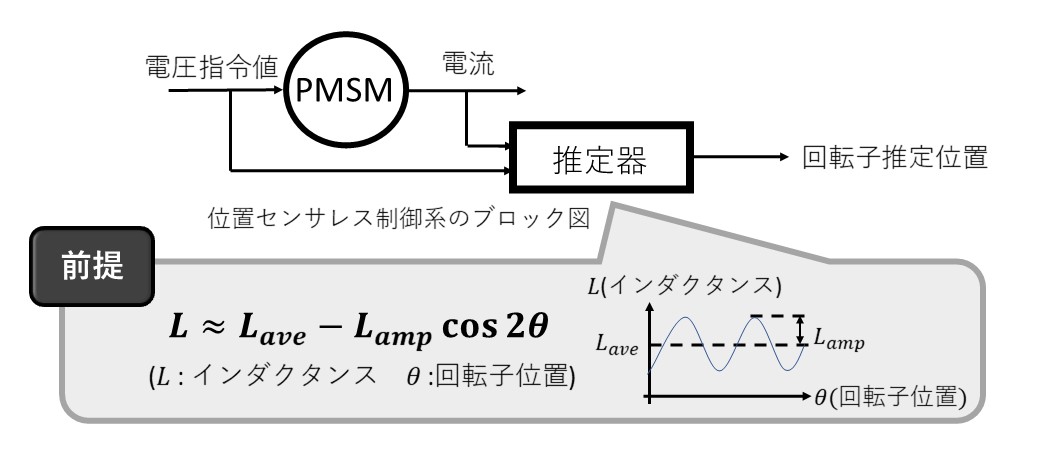
しかし、実際のモータ内部では磁気飽和の影響からインダクタンスLは正弦波状に分布していません。したがって、従来の数式モデルによる近似ではその近似誤差から要求される回転子位置の推定精度が得られていません。
本研究の目的は制御において良い精度を得るには制度の良い数式モデルが必要という考えから、まず従来の数式モデルを見直し、磁気飽和を考慮した新しい数式モデルを構築することで位置センサレスにおける位置決め制御の精度性能の向上を目的としています。