研究テーマ / Research topic
永久磁石同期モータのインダクタンス変動が 位置推定に与える影響を考慮した位置センサレス制御
| English ver. | Japanese ver. |
永久磁石同期モータのインダクタンス変動が
位置推定に与える影響を考慮した位置センサレス制御
キーワード / Keywords
永久磁石同期モータ,位置センサレス制御,拡張誘起電圧, パラメータ同定, マルチレートサンプリング
Permanent Magnet Synchronous Motor, Position sensorless control,Extended ElectroMotive Force(EEMF), Parameter Estimation, Multi rate sampling
研究背景
永久磁石同期モータ(PMSM: Permanent Magnet Synchronous Motor)は小型・高効率・高出力といったメリットを持つことから移動体や家電製品をはじめとした幅広い分野で応用されています。

PMSMを高応答かつ高精度に制御する一方式であるベクトル制御にはPMSMの回転子の位置に基づいた回転座標系で制御されるため回転子位置が必要となります。そこで回転子位置情報を取得するため一般にエンコーダやレゾルバといった位置センサが取り付けられます。しかしセンサ自体のコストや堅牢性、調整の手間といったデメリットから位置センサを用いず、制御器内で電流・電圧情報から回転子位置を推定する位置センサレス制御が注目されており、現在では実用化もされています。
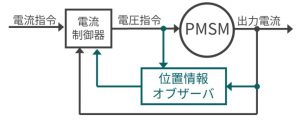
そのような位置センサレス制御にはPMSMの数式モデルに基づいて位置推定が行われるため、抵抗やインダクタンスといったパラメータが必要不可欠となります。抵抗やインダクタンスはそれぞれ温度や電流に依存してノミナル値から変動してしまうため、動作点によってはPMSMのパラメータ真値と制御器内でのパラメータ設定値間での誤差が大きくなり、位置センサレス制御が破綻してしまいます。そこで私は拡張誘起電圧を用いた位置センサレス制御のパラメータ変動に対するロバスト化を目標として研究に取り組んでいます。
a
研究内容
位置センサレス制御のパラメータ変動変動に対するロバスト化に対するアプローチとしてはパラメータ同定を行う手法や位置推定精度に支配的なパラメータに対する感度を下げるといった手法が挙げられます。中でも本研究はパラメータ同定に着目しています。
これまで提案されてきたPMSMパラメータ同定法は、インダクタンスの同定に抵抗値が必要であるように、あるパラメータを同定するためには他のパラメータが必要となります。そこでまず、抵抗値に影響の受けないインダクタンスの同定を目指しています。
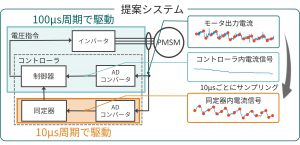
本研究では近年のモータ制御に用いるコントローラの性能の向上を利用し、従来では電流制御周期に同期してパラメータ同定が行われていたところを、制御周期とパラメータ同定周期を切り離してマルチレートなシステムを提案することで新しく取得できる情報からパラメータ情報を検出しパラメータ同定を行います。
a
同定原理
本研究ではPMSMが一次遅れ系の応答を示すことに着目し、パラメータ変動による時定数の変化の検出を行います。一次遅れ系の時定数はτ=L/Rで表され、インダクタンスが磁気飽和により減少することで時定数が減少、結果として応答が早くなります。
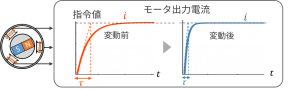
この電流応答の変化をインバータの出力電圧間で検出し続けることでインダクタンスの同定を行っております。

現在の取り組み
現在はインダクタンス同定のオンライン化を目指してアルゴリズムの検討と電流サンプリング精度の向上に取り組んでおります。