研究テーマ / Research topic
デュアルマイコンを用いた二重三相固定子巻線モータ制御系の検討
90秒でわかる研究概要
研究背景
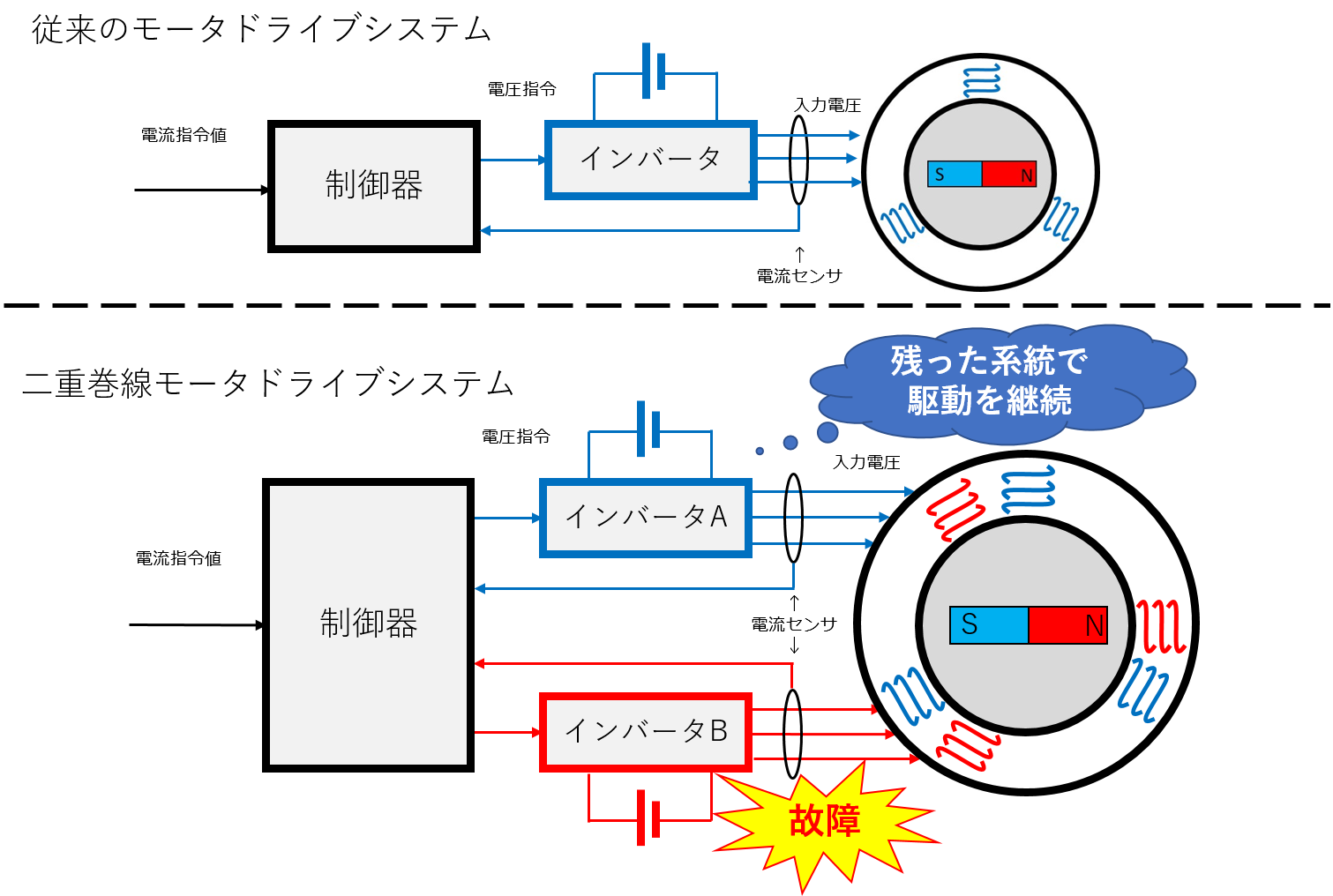
二重三相固定子巻線モータ(通称:二重巻線モータ)は中性点が独立した二つの巻線系統を持ちます。このような特徴から二重巻線モータは安全性が高いモータであるといえます。
上の図は従来のモータドライブシステムと、二重巻線モータドライブシステムを表しています。従来のモータでは、インバータや巻線が故障してしまうと、もちろん駆動を継続することができませんでした。しかしながら二重巻線モータの方では、仮に片方のインバータや巻線が故障した場合にも、残った片方の系統で駆動を継続することができます。
このような高い安全性から、今後電気自動車、電機船舶、電気飛行機等、
移動体分野での活躍が期待されています。
高い安全性を持つ二重巻線モータですが、従来モータに比べて構造が複雑になっており、その分制御も難しくなっています。では具体的な二重巻線モータの”制御の難しさ”についてお話します。
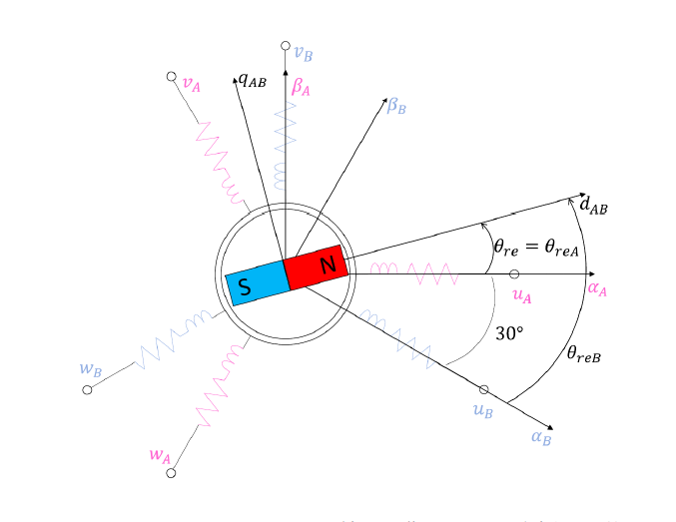
そのために、モータ制御に多く用いられる”磁石の角度を基準とした座標系(d-q座標系)における電圧方程式を以下に載せます。
dq軸等価回路
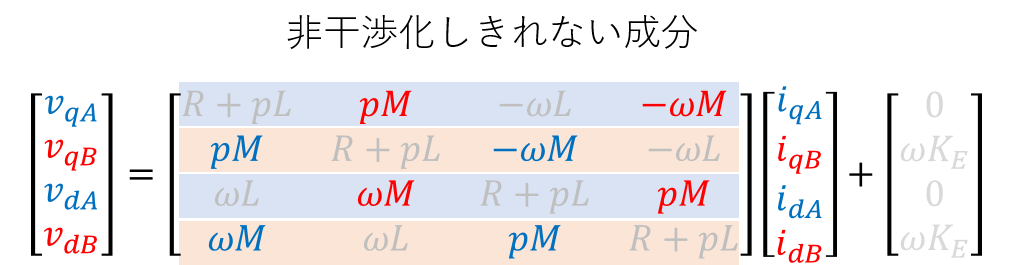
DTP-PMSM電圧方程式

(R抵抗、L自己インダクタンス、M相互インダクタンス、ω回転速度、KE磁石の強さ、p微分演算子。基本的にモータごとに既知の定数として扱う。変数はiとv)
モータが出す力(トルク)はPn×KE×(iqA+iqB)で計算されます。(Pnはモータごとの定数)
つまり
インバータによる入力電圧によってモータの電流を任意に制御できればモータを自在に操ることができます。
このような制御法を”電流ベクトル制御”といいます。しかしながら、この”電流ベクトル制御”はそう簡単ではありません。
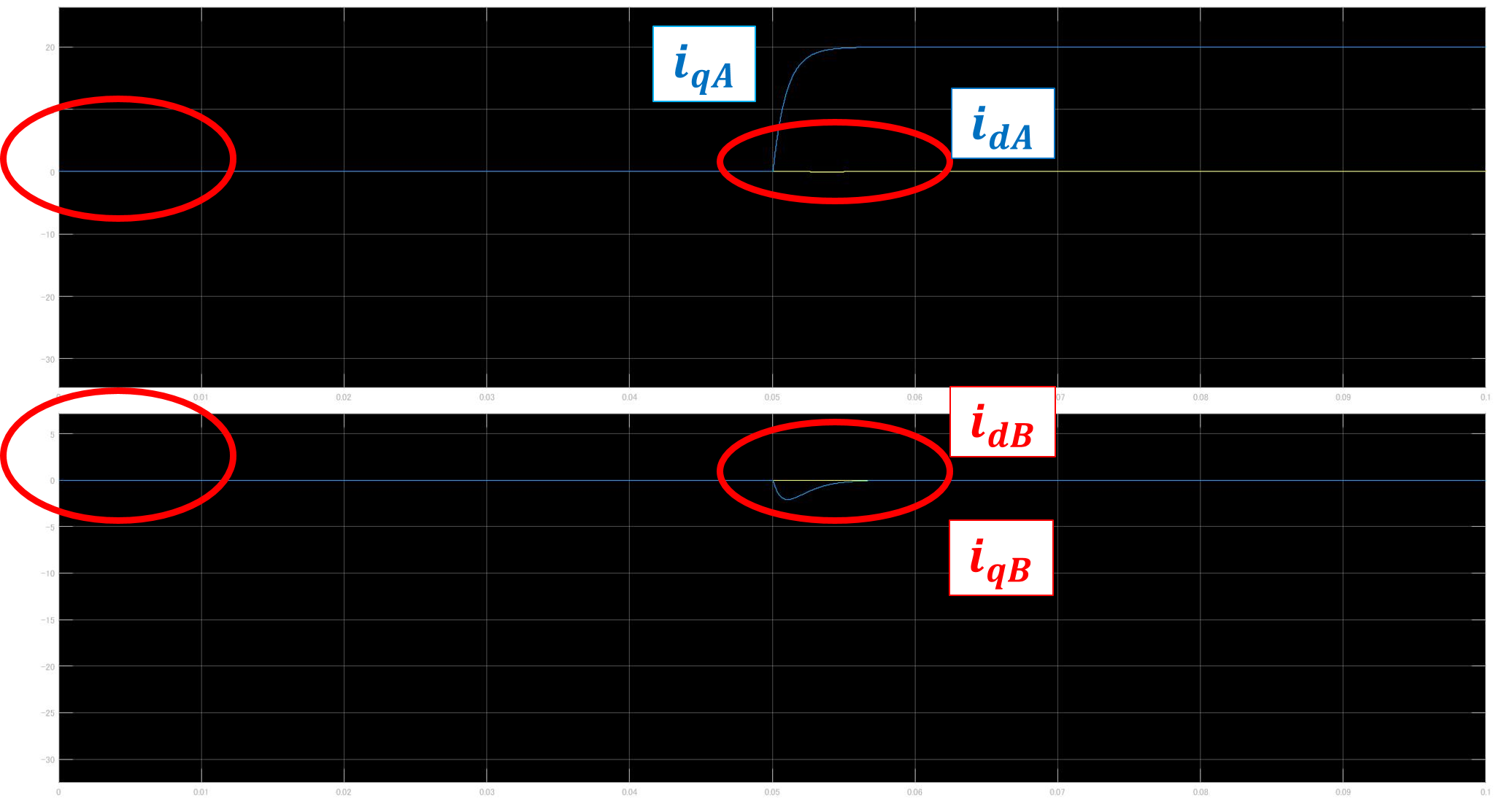
式をみると入力電圧と他軸の電流の間には干渉成分が存在することがわかります。つまりA系統q軸電圧(vdA)を印加すると、A系統q軸電流(iqA)だけでなく、他の軸にも電流が流れることになります。具体的にイメージするために、A系統q軸だけに入力電圧を加えたシミュレーション結果をお見せします。
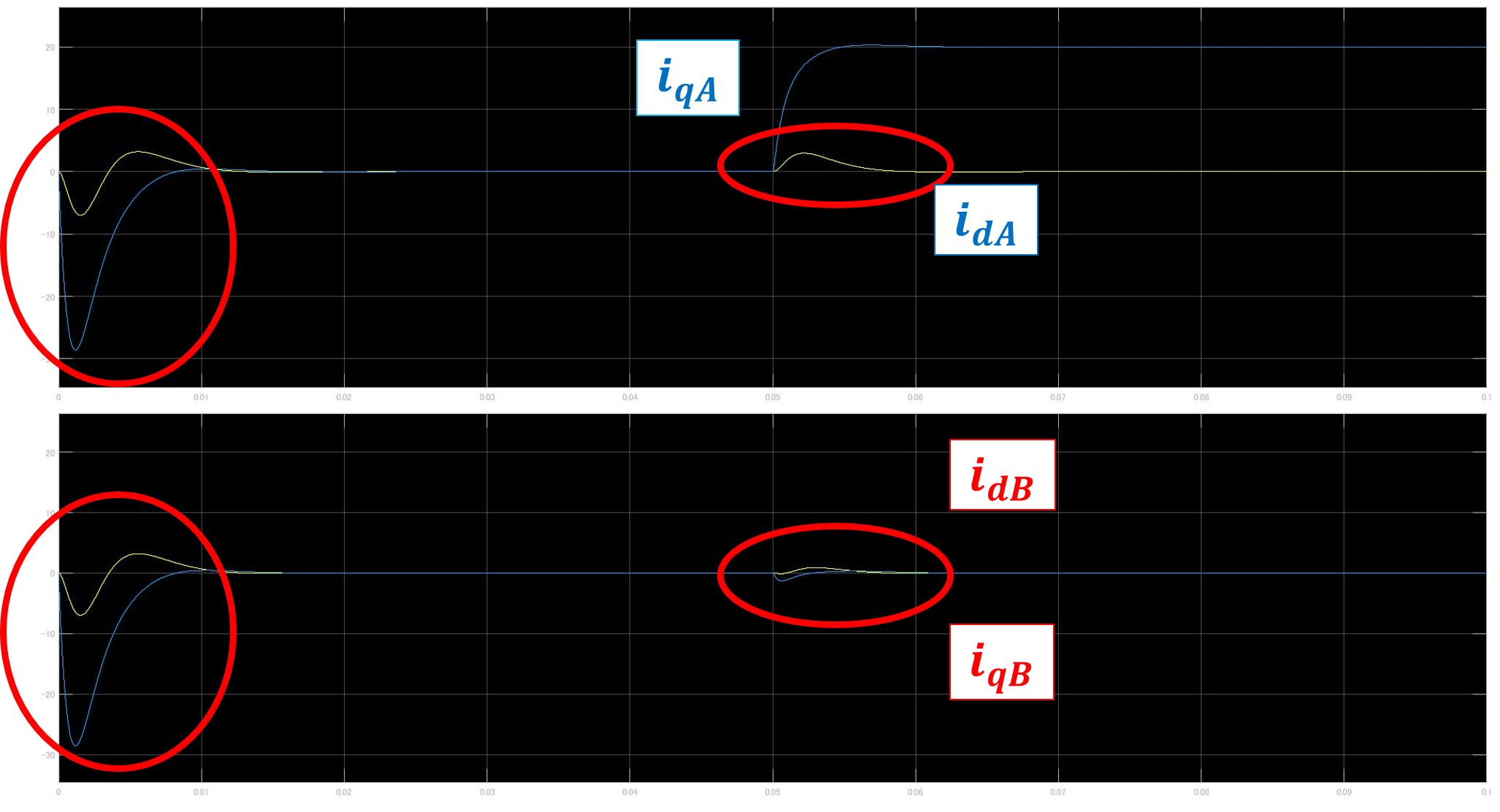
この図は各軸電流の挙動をシミュレーションしたものです。まず0秒でモータを回し初め、図の真ん中あたりでvdAに入力電圧を加えました。この結果では回し初めに速度に比例した項の影響によって大きな電流が流れてしまっています。また、
vdaの入力時に、干渉成分によってiqA以外の電流も流れてしまっています。このように干渉項に注意して制御を行わないと、狙った通りの電流をモータに流すことができません。
研究内容
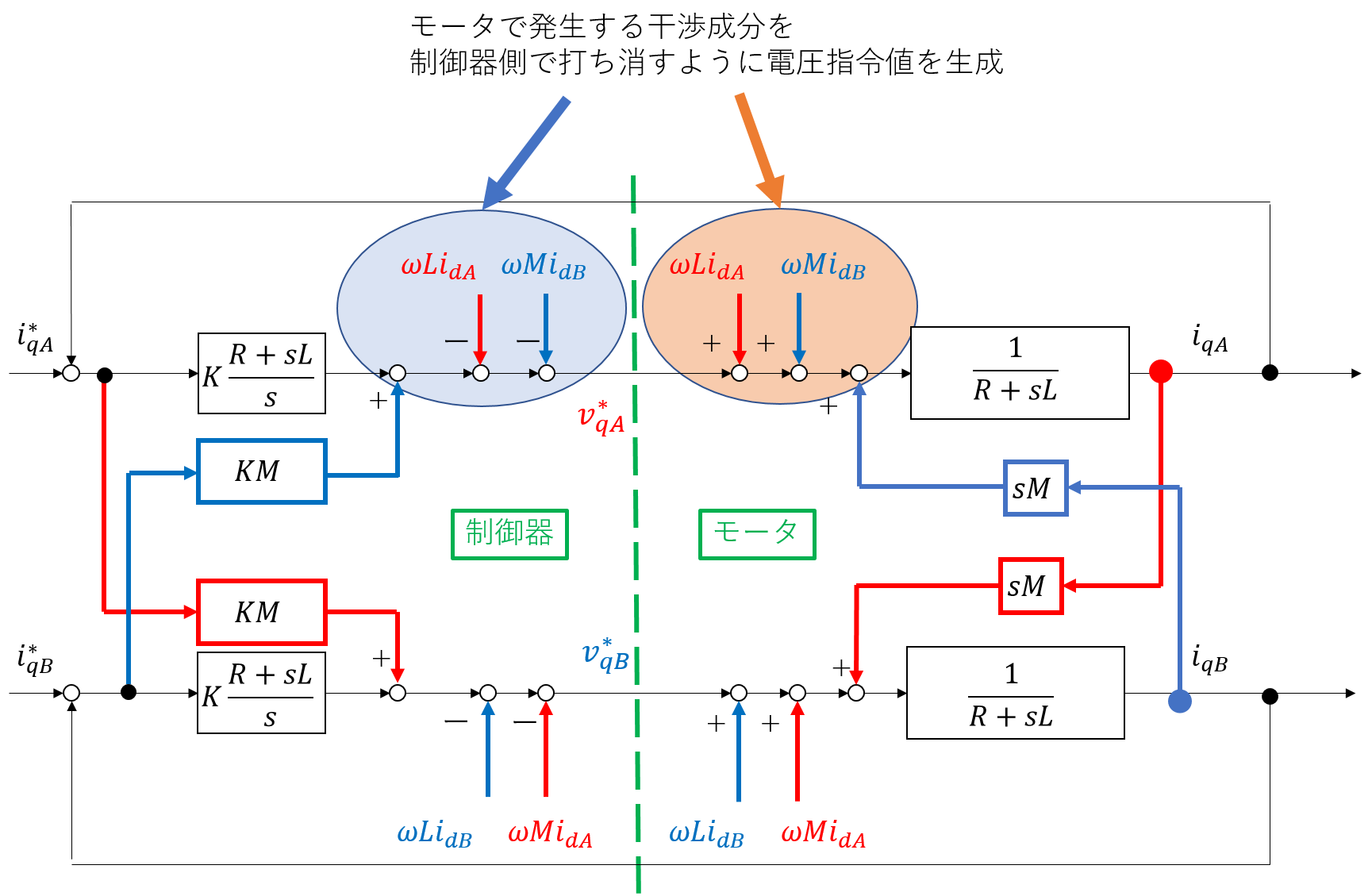
このような問題に対して、“非干渉制御”という解決策があります。
予め干渉があることを見越して、干渉成分を打ち消すような指令値を作ることで、干渉の影響をキャンセルすることができます。下の図が非干渉制御を施した制御ブロック図です。電流センサで取得した電流情報を基に制御器内で干渉成分と逆符号の成分を入力しています。
シミュレーション結果
上の図が非干渉制御を行ったときのシミュレーション結果になります。先ほどと比べて、初期値応答も良く、vdaの入力時に、iqA以外の電流はほとんど流れておらず、
各軸の入力電圧によって各軸の電流がそれぞれ制御可能であることがわかります。このように非干渉制御を行うことで任意の電流を流すことができ、結果、モータも思いのままに操ることができます。
最新の研究では、さらなる安全性のために、下図のように制御器(マイコン)も多重化したデュアルマイコンによる二重巻線モータドライブシステムが提案されています。
デュアルマイコンによる二重巻線モータドライブシステム
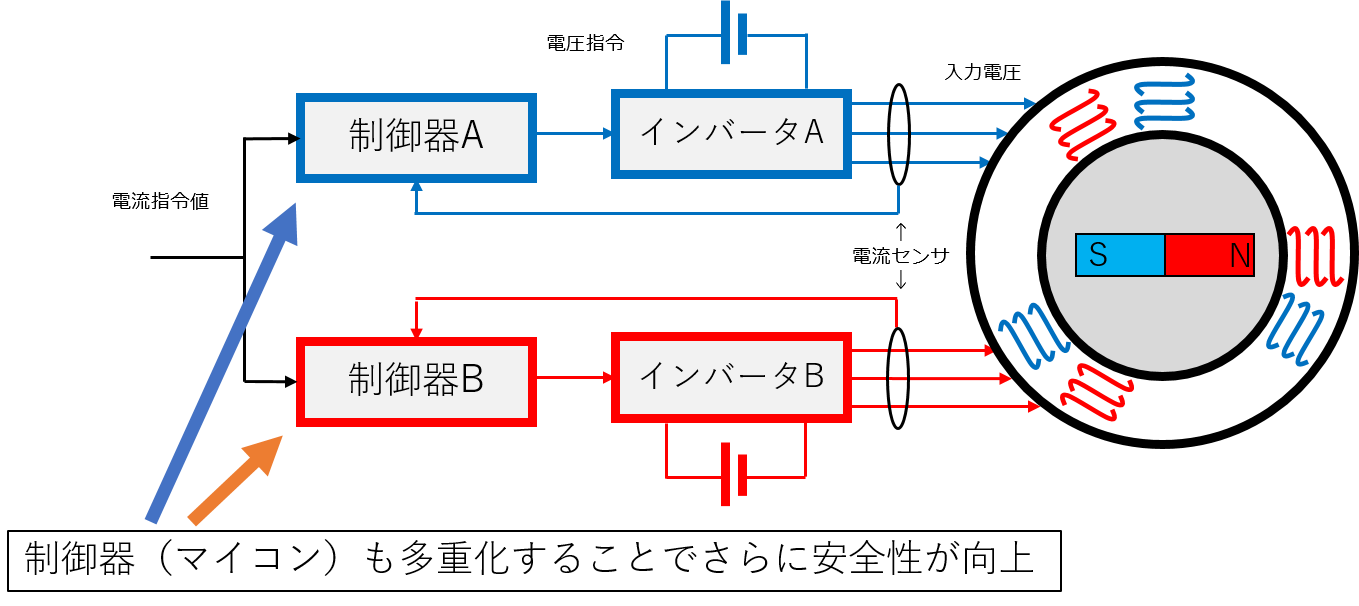
しかしこの構成をよく見ると、A系統の電流センサ情報はA系統制御器のみ、B系統の電流センサ情報はB系統制御器のみにFB(フィードバック)されています。何故このような構成になっているのか??もしセンサ系に故障があった場合、パワー回路的に接続されている制御器も同時に壊れるおそれがあるからです。つまり、各電流センサから両制御器に接続してしまうとか片系統のセンサ故障が両方の制御器を破壊してしまう可能性があります。そうなると多重化した意味が薄れてしまうため、このような構成になっています。
しかしこの構成には大きな課題があります。
それは他系統の電流情報が取得できないせいで十分な非干渉制御が行えないという課題です。先ほどの電圧方程式を再びみてみると、例えばvqAの指令値を作るにはiqBとidBの電流情報が必要なことがわかります。しかしながら他系統の電流情報はFBされないため、どうしても非干渉制御を実現させることができません。
現在はこの問題に対して、制御法を工夫することで、マイコンが1つの場合と同等の制御性能実現を目指しています。
実は電流FB以外にも”座標変換”によっても非干渉化ができる場合があります。
多相モータによく用いられる座標変換に”和と差座標変換”と呼ばれるものがあります。これはどういうものかというと、電流を”d軸”と”q軸”、ではなく、
“トルクに作用する電流の軸”と”トルクに作用しない電流の軸”に分けるものです。実は最初の方にちらっと出ていた、モータが出す力(トルク)の式が関係してきます。トルク式を再掲すると
T=Pn×KE×(iqA+iqB)
でした。この式をみるとトルクに作用するのは(iqA+iqB)だけで、究極的には他の電流は発散(制御破綻)さえしなければ、どんな値でもトルクには作用しません。
つまりq軸の和電流が制御できれば、トルク制御が可能ということです。これに着目したのが”和と差座用変換”です。実際に和と差座標変換をした電圧方程式を以下に掲載します。
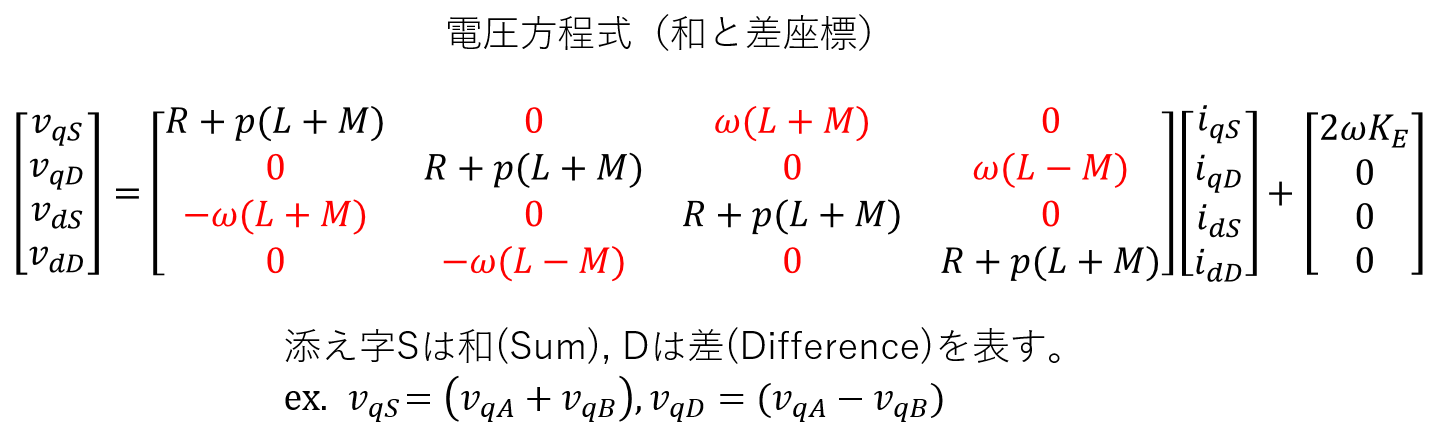
この電圧方程式によるブロック線図は以下のようになります。
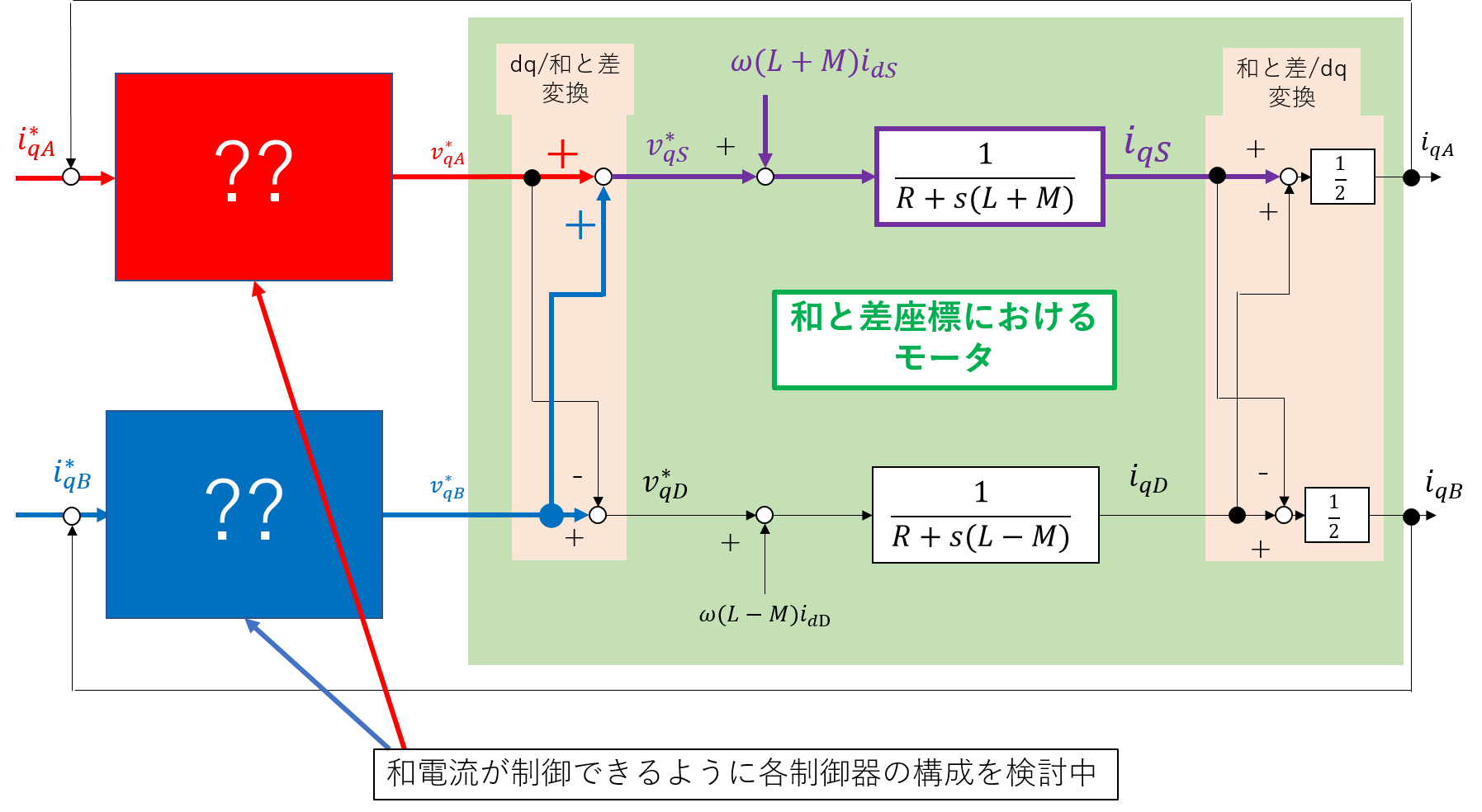
現在は自系統の電流情報しか使えない、という制限のもとで、図の上側のiqSを制御できるような制御系設計に取り組んでいます。
この問題に挑戦してみたい(もしくは自分なら解けると思った!)方はぜひ道木研究室へ!!