研究テーマ / Research topic
無人飛行体を用いた構造物自動点検のための複数飛行体による位置推定システム
LOCALIZATION SYSTEM BY MULTIPLE UAVS
UAVの発展– DEVELOPMENT OF UNMANNED AERIAL VEHICLES |
 「空の産業革命」とも呼ばれるUAV (Unmanned Aerial Vehicle)の飛行性能は飛躍的な進化を遂げており、従来の空撮や農業のみならず、点検、配送、災害調査などさまざまな分野への利用が注目されています。私の研究対象である点検分野では、機動性の高いUAVを用いることで大規模なインフラ設備の効率的な点検が期待されています。
「空の産業革命」とも呼ばれるUAV (Unmanned Aerial Vehicle)の飛行性能は飛躍的な進化を遂げており、従来の空撮や農業のみならず、点検、配送、災害調査などさまざまな分野への利用が注目されています。私の研究対象である点検分野では、機動性の高いUAVを用いることで大規模なインフラ設備の効率的な点検が期待されています。
私は、UAVの自律飛行による自動点検システムの実現を目指して研究しています。自動点検が実現することで、作業員の操縦スキルに依存しない正確で効率的な点検が可能となります。
The flight performance of UAVs (Unmanned Aerial Vehicles) has dramatically improved, and they have been used not only for aerial photography and agriculture but also for various fields such as inspection, delivery, and disaster investigation. In inspection, my research object, efficient inspection of large-scale infrastructure is expected by using UAVs with high mobility.
I have aimed to realize automatic inspection system by UAVs. By realizing automatic inspection system, accurate and efficient inspection is possible without depending on the operator’s steering skill.
自己位置推定– LOCALIZATION |
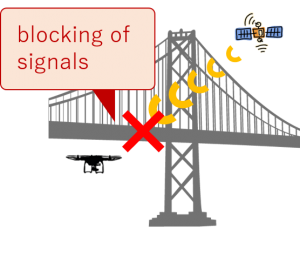 UAVによる自動点検実現のためには、自己位置推定性能の向上が重要です。自己位置推定とは、センサ情報を基に自らの位置を推定する技術です。屋外用UAVでは、GPSなどの衛星測位システムを用いた自己位置推定が一般的です。しかし、橋梁をはじめとするインフラ設備の点検においては、点検対象である構造物によって衛星信号が遮断され、位置推定が破綻する恐れがあります。自動点検のためには、構造物付近での新たな位置推定手法の確立が必要といえます。
UAVによる自動点検実現のためには、自己位置推定性能の向上が重要です。自己位置推定とは、センサ情報を基に自らの位置を推定する技術です。屋外用UAVでは、GPSなどの衛星測位システムを用いた自己位置推定が一般的です。しかし、橋梁をはじめとするインフラ設備の点検においては、点検対象である構造物によって衛星信号が遮断され、位置推定が破綻する恐れがあります。自動点検のためには、構造物付近での新たな位置推定手法の確立が必要といえます。
In order to inspect facilities automatically, improvement of localization performance is important. Localization is a technique to estimate its own position based on sensor information. For outdoor UAVs, GPS is the common localization method. However, when inspecting infrastructure such as bridges, the satellite signals are blocked by facilities and localization may collapse. For automatic inspection, it is necessary to establish a new localization method near facilities.
提案する位置推定システム– PROPOSED LOCALIZATION SYSTEM |
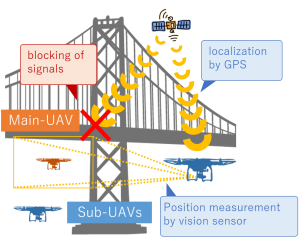 私は、複数のUAVを用いた位置推定システムを提案しています。このシステムでは、衛星測位システムによるUAVの位置情報を、カメラによる他のUAVとの相対位置計測によって補完することで自己位置推定性能の向上を図っています。これが実現すれば、UAVに標準搭載されているGPSやカメラのみで自己位置推定が可能となります。
私は、複数のUAVを用いた位置推定システムを提案しています。このシステムでは、衛星測位システムによるUAVの位置情報を、カメラによる他のUAVとの相対位置計測によって補完することで自己位置推定性能の向上を図っています。これが実現すれば、UAVに標準搭載されているGPSやカメラのみで自己位置推定が可能となります。
現在、UAV群を1機の点検用UAV(主機)と複数の位置推定補助用UAV(補機)の2種類に分け、主機の点検経路に対して位置推定精度が向上するような補機群の経路計画手法を検討しています。下の動画は、主機(桃色)の経路に対し、3機の補機(緑色)の経路をシミュレーション上で計画した結果です。主機単体では経路全体の6割以上で位置推定が不可能であったのに対し、経路を計画することで主機の点検経路全域で位置推定が可能となることを確認しました。
今後は実機を用いて提案システムの妥当性を検証していきます。
I have proposed a localization system using multiple UAVs. In this system, position information of UAVs by GPS are complemented by relative position measurement by other UAVs. By realizing this system, localization is possible only with GPS and cameras that are installed in UAVs as standard.
At present, UAVs are clasiffied into two types: a UAV for inspection (main-UAV) and UAVs for localization assistance (sub-UAV), and I have been researched path planning method of sub-UAVs for improving localization accuracy of the main-UAV. The movie is the simulation result of planned path of three sub-UAVs (green) using the path of the main-UAV (pink). I confirmed that localization was possible through the whole path of the main-UAV, while localization was impossible more than 60 % of the path in the case of using only main-UAV.
In the future, I will validate the proposed system using actual UAVs.
本研究はJSPS科研費基盤研究(C)JP16K00360の助成を受けて実施したものです。
This work was supported by JSPS KAKENHI (Grant-in-Aid for Scientific
Research (C)) Grant Number JP16K00360.