研究テーマ / Research topic
装着型アシストロボットにおける人体との接触状態を考慮した制御法の検討
腰から首にかけての体幹部全体をアシストする多関節装着型ロボットの実現を目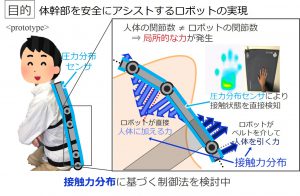 指す.人体に直接触れる装着型ロボットでは安全性確保が重要である.多数の関節で構成される体幹部では,人体と同様の関節配置を持つロボットの製作は現実的ではない.構造の差異に起因した動きの差異が生じ,ロボットが人体に加える力(接触力)に偏りが生じる可能性がある.体幹部の安全なアシストには,接触力を直接制御することが望ましい.接触力を圧力分布センサにより取得し,ロボットを制御する.
指す.人体に直接触れる装着型ロボットでは安全性確保が重要である.多数の関節で構成される体幹部では,人体と同様の関節配置を持つロボットの製作は現実的ではない.構造の差異に起因した動きの差異が生じ,ロボットが人体に加える力(接触力)に偏りが生じる可能性がある.体幹部の安全なアシストには,接触力を直接制御することが望ましい.接触力を圧力分布センサにより取得し,ロボットを制御する.
詳しくはこちらへSatoAsuka_1211