研究テーマ / Research topic
駆動領域拡大・高効率化を目指し極数切替を利用した多相誘導電動機制御系
| 研究背景 |
9
研究背景
誘導電動機(IM)は堅牢、大出力という特徴から電気自動車の駆動用モータとしての需要が拡大しています。しかし、従来広く用いられてきた三相IMは図に示すように高速駆動時には高効率になる一方で低速駆動時には低効率となってしまう課題があります。
そこで、本研究では多相IMに着目しました。多相IMはモータに印加する多相交流電圧の周波数・位相差を変化させることで、極数を切り替えることができます。(図1) 極数が異なるとモータの駆動領域が変化するため、それの伴い高効率な動作領域も変化します。つまり、多相IMの極数切替を上手く利用することでモータの高効率領域を拡大することができ、三相IMの低速駆動時に低効率になる課題を解決することができると考えています。(図2)
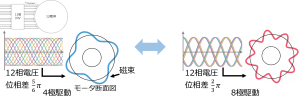
図1 印加する多相交流電圧の位相差と極数
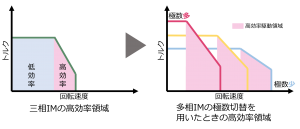
図2 極数切替による高効率駆動領域の拡大
9
研究目的
極数切替の移動体の駆動系への適用を考えたとき、極数切替中にもトルクを一定に保つことが望ましく、さらに電圧・電流制限、IM内部の磁気飽和などにも配慮しつつ、短時間での切替を行う必要があります。これまでも極数切替の方法は提案されていますが、そのどれもが切替手法をヒューリスティックに探索したものになっており、切替中にトルクが変動してしまう課題が残存しています。(図3) そこで、本研究では切替中の電圧や電流などの振る舞いを定式化することで、電圧と電流の制限へ抵触を回避し、かつトルク変動を生じない最短の極数切替則を提案しました。
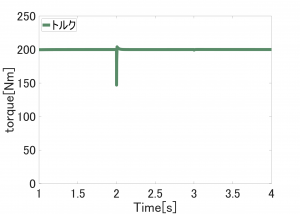
図3 先行手法のトルク変動
9
極数切替の原理
本研究では12相IMにおける8極と4極の2段切替を検討しています。図4に示すように各極数の磁束指令値とトルク指令値を入れ替えることで極数の切替を行います。磁束の指令値は磁束の応答速度を考慮したときに切替方法が図のものに限られてしまいますが、トルク指令値は合計トルクが一定という制約を守ればその切替則を任意で決定することができます。
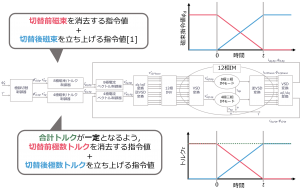
図4 極数切替制御器による磁束指令値とトルク指令値
[1]Takayuki Mizuno, Kazuo Tsuboi, Isao Hirotsuka, Isao Matsuda, Tadao Kobayashi, and Shintaro Suzuki. Basic principle and maximum torque characteristics of a sixphase pole change induction motor for electric vehicles. IEEJ Transactions on Industry Applications, Vol. 116, pp. 256–264, 2 1996.
9
本研究の提案
本研究では、まず、電圧と電流の過渡応答を導出することで、極数切替中の応答を数式によって明らかにしました。
次に、図5で示す先行研究の切替則における電圧制限への抵触の原因を解析しました。電圧には(トルク二乗)/(磁束三乗)の項があり、このとき磁束もトルクもランプ状の変化をしていることから、(トルク二乗)/(磁束三乗)∝1/tと示すことができます。つまり、(トルク二乗)/(磁束三乗)の項がtが0に近いときに発散することが原因で電圧が制限へ抵触するということが明らかとなりました。
そこで、本研究では(トルク二乗)/(磁束三乗)∝tとなるように、トルク∝t²とする切替則を提案しました。(図6)
実際に、シミュレーション結果より、電圧への制限への抵触を回避し、定トルクを達成することができていることが確認できます。
また、導出した電圧と電流の過渡応答数式を用いて電圧と電流が制限に抵触しない最短の切替時間を導出しました。結果を図7に示します。切替は両極数の駆動可能領域が重なった領域で行うので、その領域を格子で区切って表現しています。
図7を図6における提案極数切替則に対して用いることで、動作点ごとに電圧と電流の制限に抵触しない最短の極数切替が可能となります。
以上より電圧と電流の制限へ抵触を回避し、かつトルク変動を生じない最短の極数切替則を提案することができました。
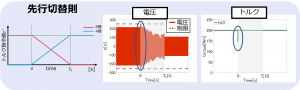
図5 先行極数切替則のシミュレーション
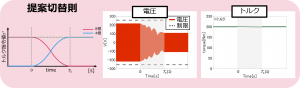
図6 提案極数切替則のシミュレーション
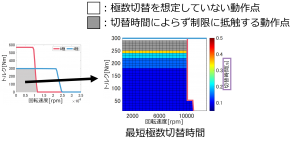
図7 提案極数切替則における最短極数切替時間