研究テーマ / Research topic
装着型アシストロボットにおける 接触力分布センサ内蔵リンクの開発
| English ver. | Japanese ver. |
9E
ap
接触力を用いたアシストスーツ
近年、社会の高齢化に伴い介護や農業など肉体労働の分野での高齢化が深刻化しており、その解決策の一つとしてアシストスーツが提案されています。
しかし、アシストスーツにおいて既存のモータのトルクセンサを使った制御手法ではリンク部にかかる局所的な圧力の人体への危険性の判別が難しく(下図)、その問題に対する解決策としてリンクの接触力分布を計測可能なセンサの開発を行っております。

ここで、リンク一体型にするメリットとして以下の
-
- コンパクト化
- 対故障性の増加
- 人体に沿った設計の可能
などが挙げられアシストスーツの設計に見合ったリンクになると考えられます。
柔軟素材を使ったセンシング
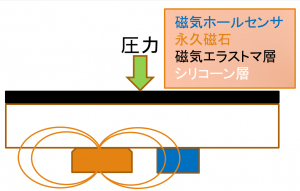
接触力を計測する手法としてシリコーンを用いて磁性体(鉄粉)を含んだ層(磁気エラストマ層)と純シリコーンの2層の柔軟層を形成しその下部に磁気ホールセンサと永久磁石を設置しました。
この構造では磁気エラストマ層の変形により発生した磁界の変化をホールセンサで計測するメカニズムであり、これは大阪大学の石原 尚先生の提案手法となります。[1]
リンク一体型センサ
上記のセンシングメカニズムにすることで柔軟層と回路の間に配線がないため、常に人体に触れる磁気エラストマ層の交換が容易になります、また柔軟素材内部に配線などがないことは接触センサの柔軟性を保つ点と変形による断線などがなくなり対故障性能が向上するなどのアシストスーツにとって重要なメリットが生まれます。
[1] 川節 拓実, 堀井 隆斗, 石原 尚, 浅田 稔. 磁性・非磁性エラス
トマを積層した磁気式触覚センサの基礎特性解析. 日本 AEM
学会誌. Vol.24, No.3, pp.204-209, Dec. 21, 2016.