研究テーマ / Research topic
装着型ロボットの高出力アシストと安全性の両立を目指した制御システムの実現
装着型ロボットの高出力アシストと安全性の両立を目指した制御システムの実現 |
_
研究背景 |
|
制御の観点から高出力アシストと安全性向上の両立を目指す
_
装着型アシストロボットは,
人に装着して作業負担を軽減するロボットです.
運搬作業や,介護現場における介助作業の負担軽減のために,更なる高出力アシストが求められています.一方で高出力アシストをしようとすると,ロボットが装着者に対して危険な力を加えてしまう可能性が高くなります.高出力アシストの実現には,更なる安全性向上が必要だといえます.
私は,高出力アシストと安全性との両立が可能な制御システムの実現を目指しています.
_
両立のためのキーポイント |
|
ロボットが装着者に加える力をどのように計測・制御するか
_
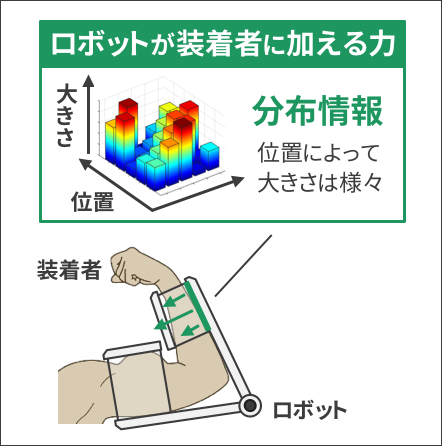

高出力アシストと安全性向上の両立のためには,ロボットが装着者に加える力をより正確に把握することが重要だと考えています.
ロボットと装着者とは面で接触し,力を加えます.面で力が加わるため,位置によって力の大きさは様々です.
すなわち,ロボットが装着者に加わる力は,分布情報であるといえます.この分布情報を,いかに計測し,いかに制御に活かすかが重要なことだと考えています.
_
提案する制御システム |
|
【既存手法】トルク情報に基づく制御システム
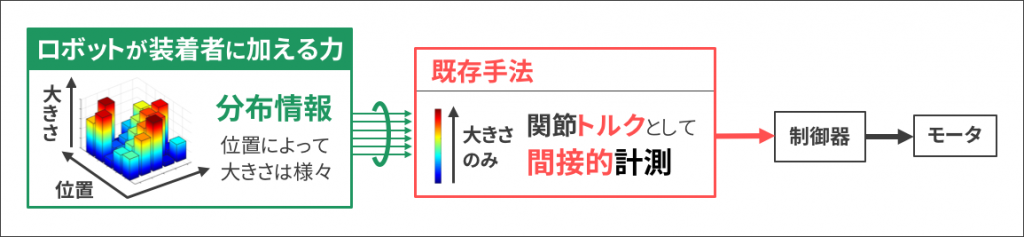
既存の装着型アシストロボットの制御システムでは,ロボットが装着者に加える力を関節につけられたトルクセンサで計測することが多いです.トルクは大きさのみのスカラ情報です.すなわち,分布情報をスカラ情報として間接的に計測していることになります.このような計測では,装着者への危険な力を見逃してしまう可能性があります.
_
【提案手法】圧力分布情報に基づく制御システム
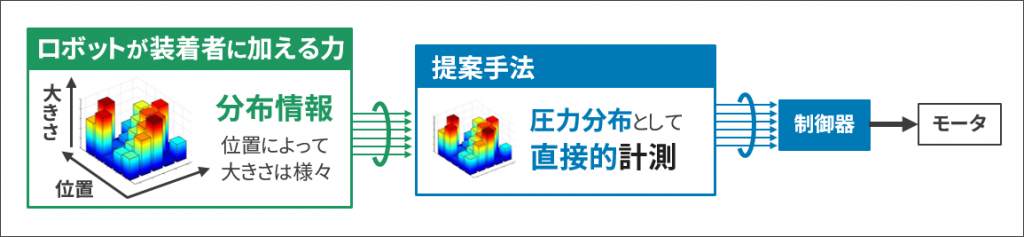
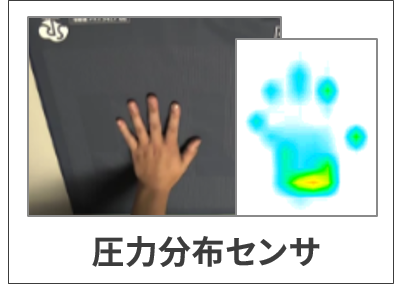
そこで私は,ロボットが装着者に加える力を圧力分布情報として計測することを考えています.
左の写真は,圧力分布センサという,力を分布情報として取得可能な面状のセンサの写真です.写真では,手を押し当て,その力を計測しています.この圧力分布センサを,ロボットと装着者が接触する面に貼り付け,分布情報を分布情報のまま直接的に計測します.これにより,今まで見逃していた可能性のある危険な力をも把握した制御が可能であると考えています.
ここで重要になってくるのは,計測情報に基づきモータへ指令を送る制御器です.これまで,分布情報に基づき制御する方法というのは(私が調べる限りでは)ありません.また制御器では,計測した多次元の分布情報を,モータへの1次元指令に変換する必要があります.計測した圧力分布をいかに制御に活かすかが研究の肝となっています.
_
ロボットの製作・実験 |
|
腕部に装着するロボットを製作
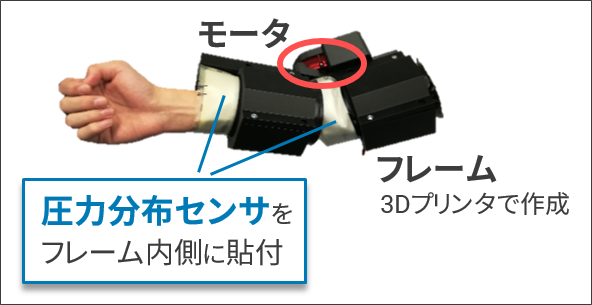
検証のために,上の写真のようなロボットを製作しました.
フレームの内側に圧力分布センサを貼り付けています.運動中の圧力分布を計測できる装着型ロボットは(おそらく)世界初でしょう.(ちなみにフレームは3Dプリンタで製作しました.素材にはカーボンが織り込まれていて,かなり軽くて丈夫です.)
_
制御システムの比較検証
このロボットを用いて,制御システムの検証を行いました.
_
上の動画は検証時の様子です.ダンベルを持って肘関節屈曲伸展運動を行いました.
_
上の動画は検証時の圧力分布の様子です.加える力は位置によって大きさが様々であることを実際に確認しました.
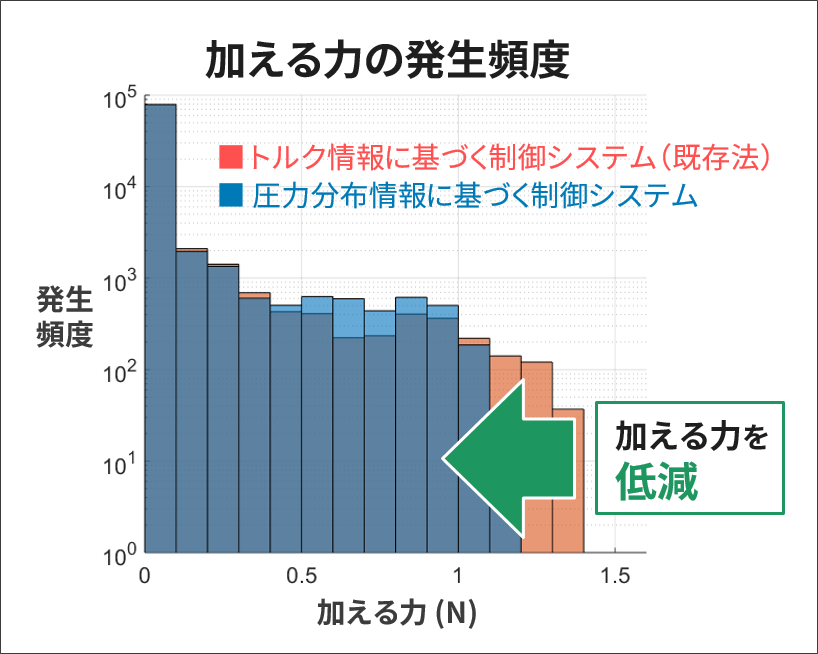
トルク情報に基づく制御システム(既存手法),圧力分布情報に基づく制御システム(提案手法)の2種類を切り替えて,同様の運動を行いました.
左の図は,そのときにロボットが装着者に加えた力の発生頻度を示しています.グラフが左に寄れば寄るほど小さい力しか発生しなかったと言え,より安全であると言えます.提案手法は既存手法と比べ,加える力を低減させ,より安全にロボットを制御した,と言えます.
また今回の実験は初期段階として安全を考慮し,アシスト力を抑えて動かしました.そのためアシスト力を増加させ,より危険な力が加わる状況になれば,提案手法の優位性がより見られる,と考えています.
そのため,今後は更にアシスト力を増加させ実験を行っていきます.