研究テーマ / Research topic
剛体フレームとソフトアクチュエータによるアシストスーツの開発
| English ver. | Japanese ver. |
Research Theme
Development of an Assist Suit with a Rigid Frame and Soft Actuator
Research Background
Currently in Japan, the demand for assistive suits is increasing due to the increase in demand for nursing care, mail order, and transportation. However, the assistive suits that have been put to practical use assist by fixing the joints and limiting the direction of movement, which inhibits free movement.
On the other hand, research on cloth-like actuators with a high degree of freedom of deformation using artificial muscles is in progress. By using these actuators as assistants, it is hoped that assistive suits can be developed that do not interfere with the free movement of joints. However, the part of the body to which the force is applied is also deformed, such as by warping, and the force cannot be transmitted properly.
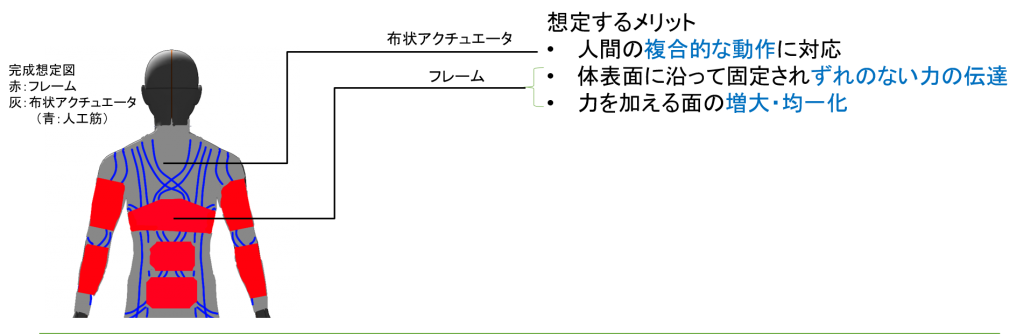
Therefore, a frame that follows the body surface is introduced at a position where it does not interfere with movement. The goal is to develop an assistive suit that can transmit force effectively without shifting while maintaining joint freedom.
Future Prospects
We will develop a prototype of an assist suit for the upper body trunk, which has a relatively large surface area for change. Based on the findings, we will extend the suit to the whole body and apply it to the shoulder joint, which has a high degree of freedom.
ap
研究背景
現在日本では、介護需要や通販・運送需要などの増加によりアシストスーツの需要が高まっている。しかし、実用化されているアシストスーツは関節を固定し運動方向を限定してアシストを行うため自由な動きを阻害される。
一方で変形自由度の高い人工筋を用いた布状アクチュエータの研究[1]が進んでいる。このアクチュエータをアシストに用いることで関節の自由な動作を阻害しないアシストスーツの開発が期待される。しかし、変形しやすいのは力を加える部分も同じであり、よれるなどしてずれてしまい力をうまく伝達できない。
そこで、動作を阻害しない位置には体表面に沿うフレームを導入し、関節自由度は保ったままずれなく効果的に力を伝達できるアシストスーツの開発を目指す。
今後の展望
比較的変化に対して表面積が大きい上半身体幹部の動作に対してアシストスーツを試作する。その後得た知見をもとに全身へ拡張し、自由度の高い肩関節などにも適用していく。
参考文献
[1] Y. Funabora. Flexible fabric actuator realizing 3d movements like human body surface for wearable devices.IEEE/RSJ International Conference on Intelligent Robotsand Systems (IROS), pp. 6992–6997, 2018.