Wu Weitong, Funabora Yuki, Doki Shinji, Doki Kae, Yoshikawa Satoru, Mitsuda Tetsuji, Xiang Jingyu,``Evaluation and Enhancement of Resolution-Aware Coverage Path Planning Method for Surface Inspection Using Unmanned Aerial Vehicles'',
IEEE Access,
2024.
Yanhong Peng, Hiroyuki Nabae, Yuki Funabora, Koichi Suzumori,``Controlling a Peristaltic Robot Inspired by Inchworms'',
Biomimetic Intelligence and Robotics,
2024.
Yanhong Peng, Hiroyuki Nabae, Yuki Funabora, Koichi Suzumori,``Peristaltic Transporting Device Inspired by Large Intestine Structure'',
Sensors and Actuators: A. Physical,
2023.
・・・
国際会議予稿
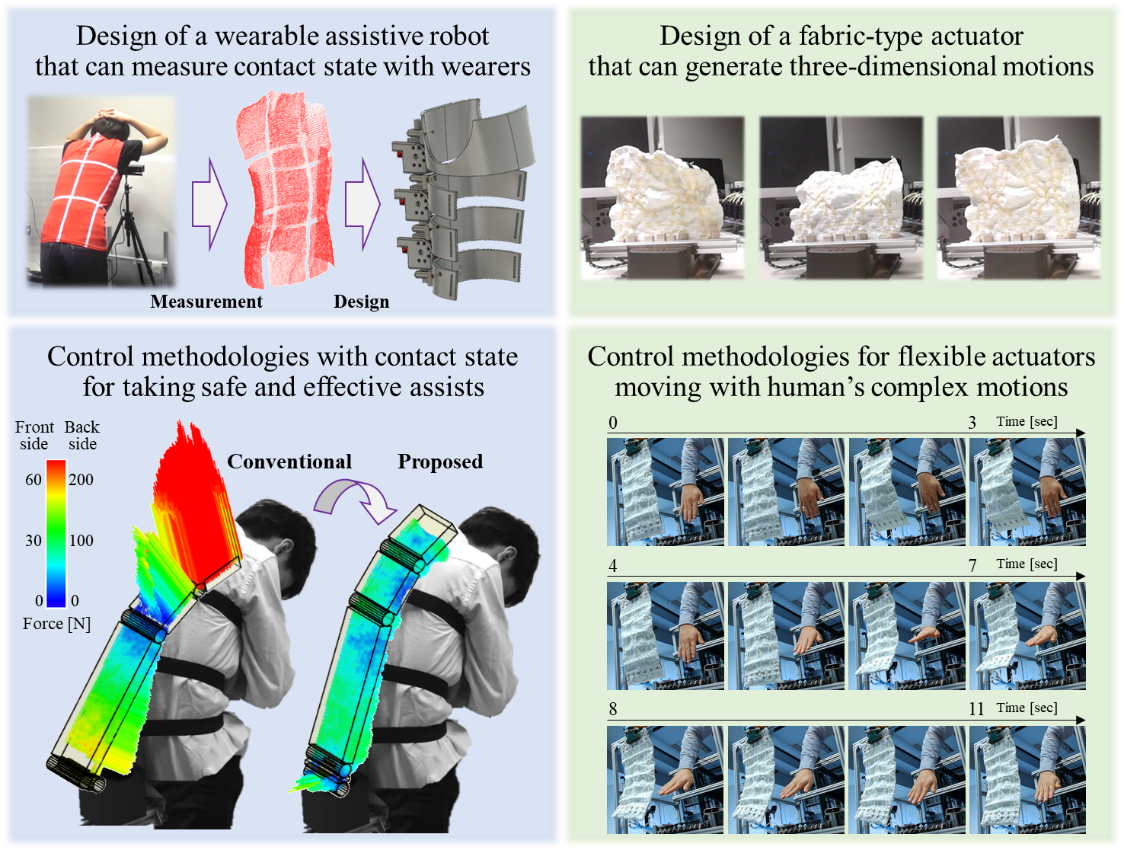
H. Yamaguchi, Y. Funabora, S. Doki, K. Doki,``Three-dimensional Deformation Control System for Fabric Actuator'',
IEEE/SICE International Symposiun on System Integration,
2020.
S. Honda, Y. Funabora, S. Doki, K. Doki,``Design of Wearable Robot Focused on Contact State with Wearer'',
The 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems ,
2019.
S. Honda, Y. Funabora, S. Doki, K. Doki,``Markerless Measurement System of Body Surface Deformation for Structure Determination of Wearable Robot'',
2019 IEEE/SICE International Symposium on System Integration,
2019.