
- 名前:
- 呉 偉桐
- 学年/肩書:
- 博士課程後期課程3年
- 役職:
- 点群いじり
- グループ:
- ロボット
- 趣味:
- ゲーム、旅行
- 一言:
- 0 error(s) , 0 warning(s)
研究テーマ / Research topic
インフラ設備外観点検に向けた計測計画
インフラ設備外観点検に向けた計測計画
研究背景
橋梁に代表されるインフラ設備の老朽化が世界中に社会課題になっています。設備の老朽化に伴い、設備にひび・錆などの異常が発生し、設備の安全に影響を及ぼし、事故に繋がる可能性があります。

(橋梁老朽化の一例)
よって、インフラ設備の安全状況を把握・異常検知する「インフラ設備点検」を定期的に行う必要があります。近接目視点検は最も基本的な点検であり、作業員が近距離で設備表面を目視で確認する作業を指しています。大型機械を用いて設備付近にアクセスする必要がある為、膨大な費用・時間・人員がかかります。
そこで、我々はカメラを搭載した、UAV(ドローン)や地面ロボット、自動ジンバル雲台などの自律ロボットを用いた設備外観自動計測を行い、取得したデータから異常を検出するという、従来の近接目視点検と同等の点検を実現することで、点検の省人化・効率化を目指しています。
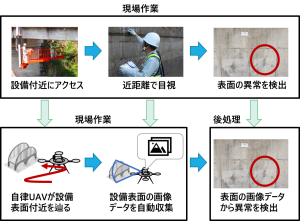
(一例:自律UAVを用いて設備の近接目視点検を行う)
インフラ設備外観の自動計測に当たって、解決しないといけない課題は以下のように3つレイヤーに分類することができます。点検に特化したデバイスやロボットが次々と開発され、ロボットの計測実行も自動化できている上、本研究は自動計測の肝となる「計測計画」の部分を取り組みます。
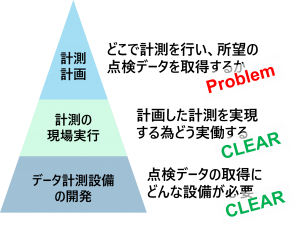
(インフラ設備外観の自動計測における課題)
研究内容
本研究が考える計測は位置・方向・倍率可変のカメラを搭載したロボットで対象設備の外観データを取得することであり、計測計画の目的はデータ取得の為に自律ロボットが行うべき最適な「行動」、なるべき「状態」、所謂ロボットの最適な制御(Control)/ カメラの配置(Configuration)の集合を決めることです。
ここの最適な配置集合は、異常を検出できる精度で外観データを漏れなく取得できる前提で、実行に必要な時間が少ない配置集合の事を指します。しかし、実際これは高次元多目的最適化問題であり、解くのがかなり困難であります。
本研究が考えるロボット配置は位置(x, y, z)、方向(pan, tilt)とレンズ倍率(焦点距離)、計6次元を含んでいて、どの要素でも計測範囲やデータ精度との関係性が複雑であります。つまり、ロボットが取り得る配置候補(解空間)は膨大であり、配置集合の組み合わせも無限に存在しています。解ごとに検証することは非現実である為、一般的なやり方は現実的な時間でなるべく良い配置集合、所謂準最適解を求めます。
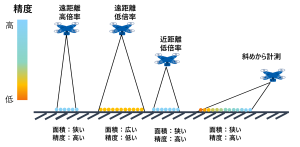
(ロボット配置と計測できたデータの関係)
点検の自動化が重視されたことにつれて、近年様々な計画法が準最適解を求める為に提案されました。しかし、これら手法は多少問題の次元数を減らして、ロボットの位置最適化問題や位置・方向最適化問題として解いています。ただし、こう得られた解の実行時間面にはまだ改善する余地があります。
その一例は下の図のように、UAV点検に向けた先行手法[1]は計測距離、角度と倍率を制限した上、計測対象全体が計測範囲(FOV)に収まる最小限のUAV位置集合を決定しています。角度と倍率の最適化は行われておらず、十分なパフォーマンスを発揮できていないと考えられます。
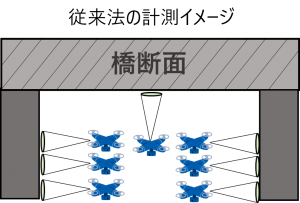
(従来法の配置の位置成分のみを最適化した結果)
そこで、本研究は計測設備の制御自由度を活用した計測計画法を提案します。提案法はロボット配置の位置・方向・倍率とも最適化することにより、実行時間が従来の解より少ない準最適解を見つけます。
関連研究
[1] K.Asa, Y.Funabora, S.Doki, K.Doki,“Measuring Position Determination for Accurate and Efficient Visual Inspection using UAV”, 2017 IEEE/SICE International Symposium on System Integration, 2017.
[2] 前田 圭吾. 他. ”構造物付近における UAV の位置推定を補助する UAV 群の最適配置”. ロボティクス・メカトロニクス 講演会 2018, 2018. 1P1-A09.
[3] Peng, Cheng, and Volkan Isler. “Visual Coverage Path Planning for Urban Environments.” IEEE Robotics and Automation Letters 5.4 (2020): 5961-5968.
研究実績
[1] 呉偉桐, 舟洞佑記, 道木慎二, 道木加絵. 外観点検タスクと位置推定を考慮したUAV 群の経路計画法の検討. 令和元年度 電気・電子・情報関係学会 東海支部連合大会, 2019.
[2] 呉偉桐, 舟洞佑記, 道木慎二, 道木加絵. Efficient Multi-UAVs Path Planning for Cooperative Localization Based Inspection with Required Accuracy.機械学会東海支部, 2019.
[3] 呉偉桐, 舟洞佑記, 道木慎二, 道木加絵. 無人飛行体によるインフラ設備外観自動点検システムのための状態データの精度と作業効率を考慮した計測位置決定. 令和二年度 電気・電子・情報関係学会 東海支部連合大会, 2020.