研究テーマ / Research topic
EV用誘導電動機(Induction Motor, IM)に関する研究
IMのEV適用に向けた以下の2テーマの研究を行っています
- 多相IMにおける極数切換制御の基礎検討(B4~現在)
- 三相IMの高速駆動に向けた離散制御系の提案(M1~現在)
研究背景
かつてよりIMは
- レアアースを用いないために材料に関する懸念がなく安価に量産可能
- ブラシを用いないためにACモータと比較して保守性が高い
- 回転子構造がかご型であるために構造が簡単, その為に高い堅牢性を誇る
- 三相交流電源を直接繋ぐことで駆動が可能である
などといった利点を持ち, 古くから工業用機械や鉄道, 家電製品といった幅広い範囲で用いられてきた.
しかしエネルギー問題などの観点より電気自動車(EV)の促進が成されている近年においてはEV用電動機への需要・要求は高まっており[1], これに伴いIMの
- 高速域で高効率である[2]
といった利点に着目したEV用電動機としての新たなIMへの需要が高まっている.
以下の2テーマはそれぞれIMのEV適用に向けた研究である
多相IMにおける極数切換制御の基礎検討
IMとPMSMの比較
詳細はこちら
EVに用いられる電動機には大きく分けて今回取り扱うIMの他にPMSM(Permanent Magnet Synchronous Motor, 磁石同期電動機)がある.
PMSMは低速時の効率に優れるといった特徴や高出力密度である点よりTOYOTA社のプリウスなどをはじめ国内向けEVに多く搭載されている.
しかしながらその一方で高速走行時の効率に劣るといった点より, 先に述べたように高速域の効率においてはIMに軍配が上がる.
以下の表はこれらの特徴をまとめたものである.
| PMSM | IM | |
|---|---|---|
| 利点 | 低速域で高効率 小型で高出力密度 |
高速域で高効率 堅牢な構造を持つ |
| 欠点 | 高速域で効率が劣る 回転子に永久磁石(レアアース)を用いるので高価 |
低速域で効率が劣る 低出力密度 |
これよりIMとPMSMのそれぞれの高効率駆動範囲は図1のように表せる.
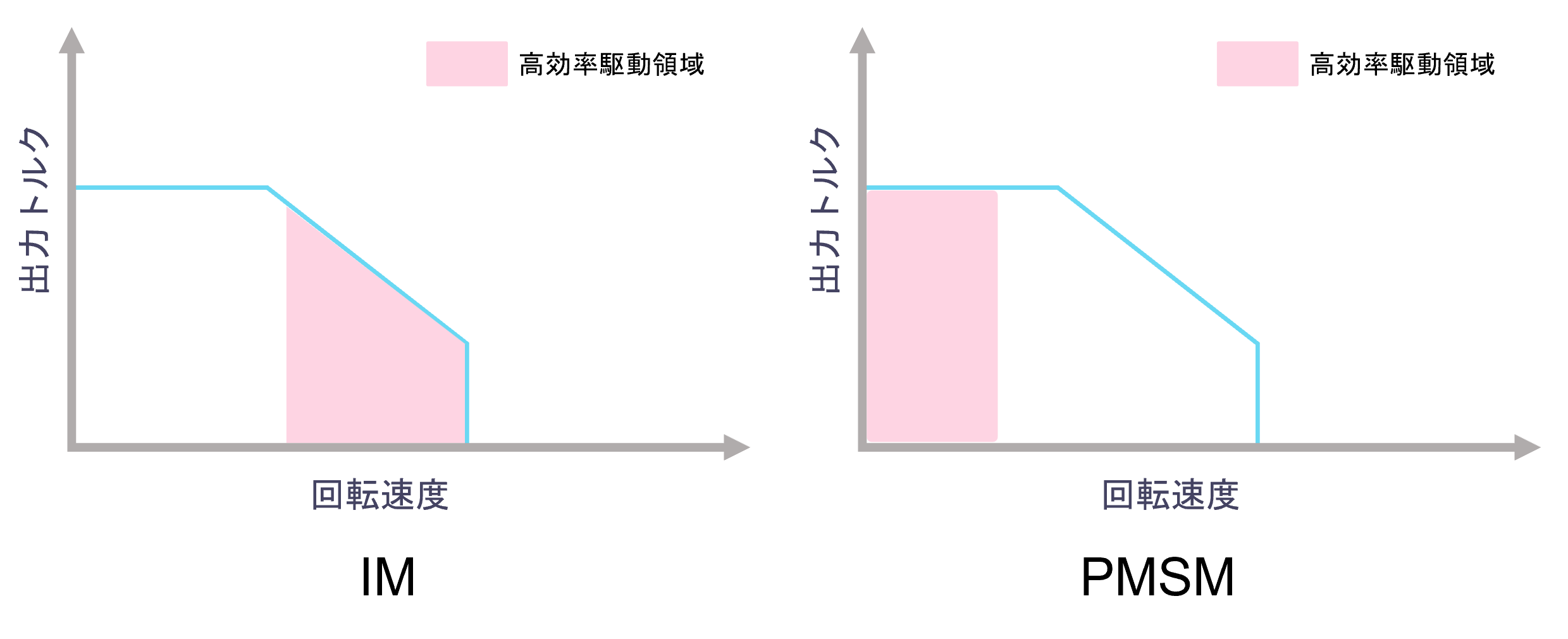
図1: IM(左)及びPMSM(右)の高効率領域
限られたバッテリーで駆動するEV用の電動機には幅広い動作点(図1の全領域)で高効率であり, かつ限られたスペースを圧迫しないために構造が大型化しないことが求められる.
しかしながら図1に示されるようにPMSMの場合には高速度域において, IMの場合は低速度域において効率が劣るといった欠点が存在する.
この欠点を補うために, 次に示す極数切換制御に着目しその制御法を確立することを目標とした研究を行っている.
極数切換制御のねらい
詳細はこちら
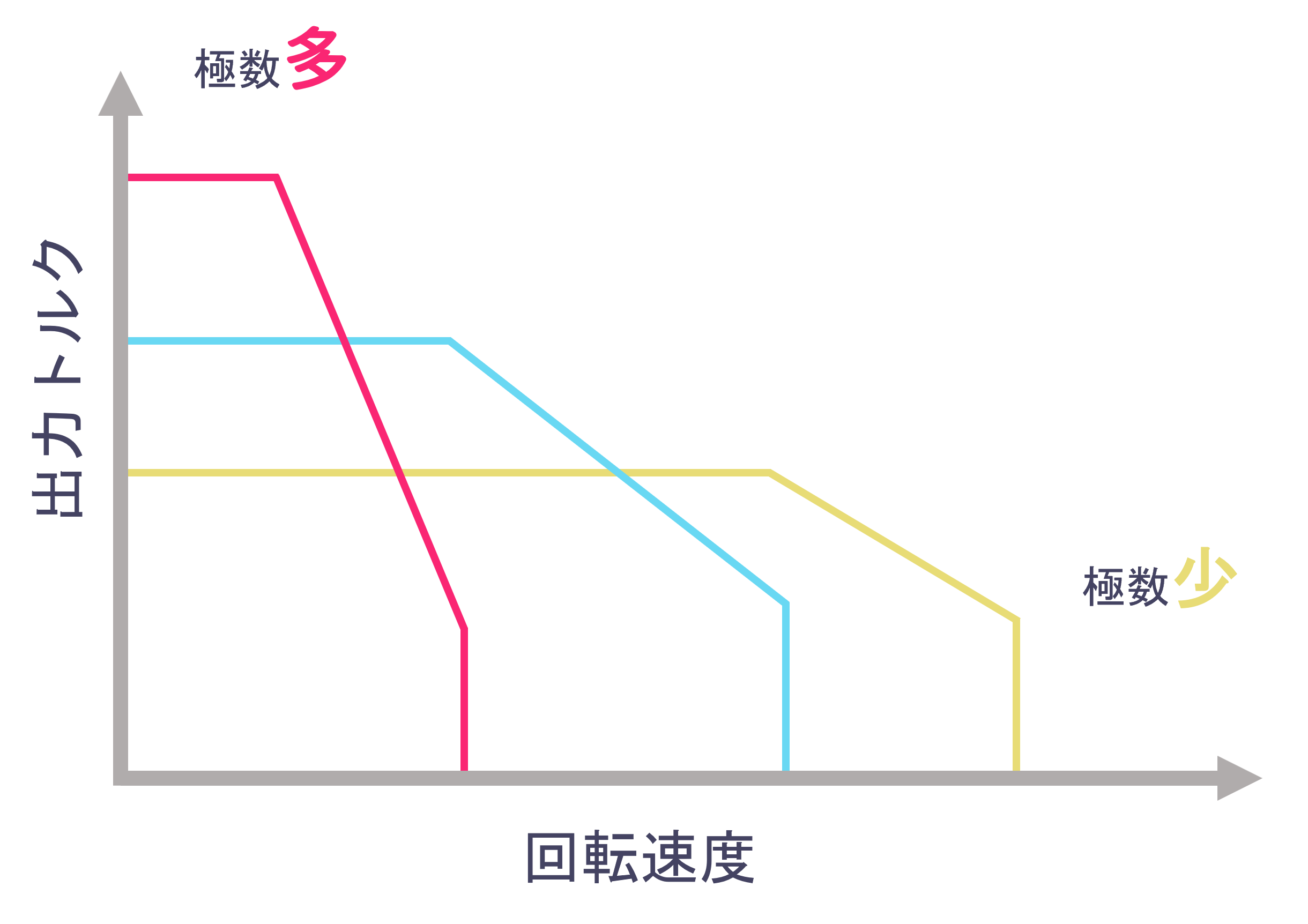
極数切換制御のねらいは図1の駆動範囲自体を変更することにある.
図のように, 駆動範囲自体の変化に伴いIMの高効率駆動領域も変化し, 結果として駆動領域全体で高効率駆動可能な領域が増加する.
更にIMの欠点であった低速域での駆動効率も改善することができる.
先にも述べたようにEV用電動機にはシステムの大型化を避けつつも広い駆動範囲において高効率駆動が可能であることが求められる.
本手法は古くより用いられてきた3相IMではなく多相IMの性質に着目した手法であり, トランスミッションなどの機械的な切換機構を必要とせず制御を用いることで駆動可能領域を変化させることが可能であるため, 省スペース化が期待できる.
現在の取り組み
詳細はこちら
先行研究[3, 4]にて行われた極数切換は切換時における過渡現象を無視し定常状態のみを制御する制御器による切換の為, 切換時に多少のトルク脈動などが発生していることに対しては目を瞑っている.
そこで本研究では切換時の過渡現象に着目し, この切換過渡に対しても制御が可能な制御器の構成を目指している. 現在はこの切換を実現するために, 先行研究[3, 4]などを参考に極数切換をシミュレーション(MATLAB/Simulink)上で再現, 過渡的に発生する現象について解析を行っている.
IMの高速駆動に向けた検討
電動機のベクトル制御について
詳細はこちら
3相交流で駆動する3相電動機に対して高いトルク応答性が求められる場合, 以下に示す手順で座標変換を行い3相交流量を2軸の直流量に変換, それぞれに対してフィードバック制御を行う.
- 3相座標系(uvw座標系)から固定座標系(αβ座標系)への変換
図4: uvw相における時間波形(左)とベクトル図による表現(右) 図4左に示される3相交流の時間波形を同図右に示されるベクトル図により表現するとき, 3相交流の対称性が保たれている条件下では図5に示されるような直交する2軸に変換することができる.
図5: αβ相における時間波形(左)とベクトル図による表現(右) これが一般に3相2相変換, Clark変換, uvw/αβ変換などと呼ばれる変換である.
- 固定座標系(αβ座標系)から回転座標系(dq座標系)への変換
続いて先ほどの固定座標系で回転するベクトルに同期した回転座標系を図6の様に設定することで, 制御対象を直流量としてみなして制御することが可能となる. この変換は一般にPark変換やαβ/dq変換などと呼ばれる.
図6: dq相における時間波形(左)とベクトル図による表現(右)
このように変換したdq軸において制御を行うために制御対象であるIMや制御器もdq軸上で設計し, その後ディジタル制御を行うために離散化を行うことで制御器を設計している.
従来の座標変換における問題点
詳細はこちら
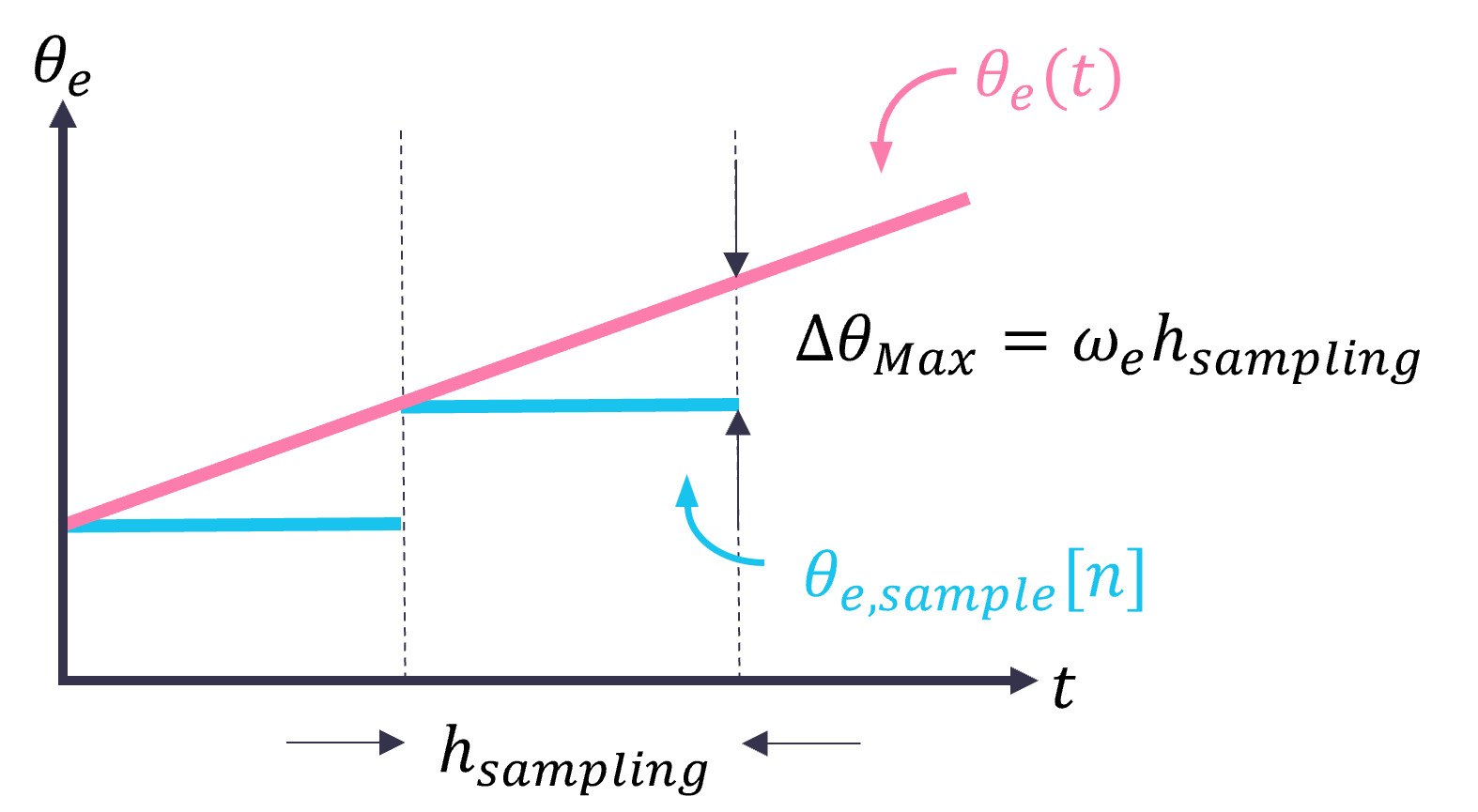
先ほどの座標変換は回転するベクトルに対して同速度で回転する座標系をとることで直流量への変換を行っていた. これにはその時々の位相θeを用いて計算を行う. しかし実装をディジタル上で行う都合上離散化を行う必要があることは先に述べたとおりであるが, この際に座標系の角度θeもまたサンプリングを行うことで離散値を得ることになる.
これに伴いサンプリング間の位相真値θeとサンプリングした位相θe, samplingの間の誤差は
- 駆動速度が増加する(1サンプル間の位相変化量が増加する)場合
- サンプリング周期が遅い(1サンプルの間隔が増加する)場合
といった条件においては正しい座標変換が行えない(図7参照).
これにより図6に示されたdq座標系は離散的なθe, samplingを用いることで図8のような挙動を示す.
 |
 |
従来の駆動速度領域においてはこの影響は小さくほぼ直流量としてみなせる程度の振動であった(図9左)が, 本研究の対象であるEVなど高速駆動が求められる際には図9右の様に振動振幅が増加, 結果としてdq座標系の前提となる直流量という仮定が崩れるのである.
 |
|
従来の制御に用いるdq軸モデルは制御対象が直流量である前提でモデル化が成されており, これを基に設計された制御器もまたこの仮定を暗に用いている.
この為, 従来の制御器を用いる場合においては高速域で十分な制御性能を得られない, 場合によっては制御破綻を生じることが問題となっている.
現在の取り組み
詳細はこちら
現在は先に示した問題に対して, PMSMにおける同様の問題に取り組んだ先行研究[5]をIMでも同様に考えてこの解決に取り組んでいる.
現在は電流制御系の再設計が完了しInternational Power Electronics Conference 2022, Himeji, Japanにて発表を行った.
現在は提案したモデルに対して更に各要素が高速駆動時に与える影響について考察を行っている.
参考文献
- 貝塚 正明 他, “自動車の電動化における最新技術動向”, 2019年, IEEJ Transactions on Industry Applications Vol. 139 No.6 pp.535-542
- 竹内 啓祐 他, “有限要素法を用いた高出力EV用誘導電動機・埋込磁石同期電動機の効率マップ比較”, 2018年, 電気学会研究資料
- 足利 正 他, “電気自動車用六相極数切換誘導電動機の一制御方法”, 1997年, T.IEE Japan, Vol. 117-D, No.6
- Yang Jia-qiang, et al, “Electronic pole changing technique of multiphase induction motor based on vector control”, 2012年, Euro. Trans. Electr, Power
- 井上 雅理 他, “座標変換器の離散化実装を考慮したPMSMのモデル化と提案モデルに基づく非干渉制御”, 2019年, 電気学会論文誌D Vol.139 No.7 pp.637-644