研究テーマ / Research topic
全駆動領域の位置センサレス制御に適した永久磁石同期モータの数式モデルの検討
永久磁石同期モータの位置センサレス制御
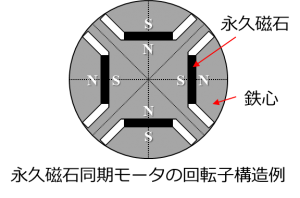
永久磁石同期モータは「小形,高効率,高出力」なモータとしてあらゆる分野で注目されています。このモータを制御するには,回転子の位置に応じて電流ベクトルを制御する必要があり,エンコーダやホールセンサ等の位置センサが必要不可欠となります。
しかしながら,位置センサを利用することによる「コスト,設置スペース,安全性」等の問題からアプリケーションによっては位置センサを用いないで制御する位置センサレス制御が要求されます。
この位置センサレス制御は,2000年前後から注目され,家電民生分野を中心に実用化も進んでいます。
本研究の着眼点①速度
位置センサレス制御の代表例として,拡張誘起電圧モデル[1]という位置センサレス制御に適したモデルが存在します。この拡張誘起電圧は永久磁石と突極性による誘起電圧を組み合わせたものであり,その拡張された誘起電圧を拡張誘起電圧と呼びます。
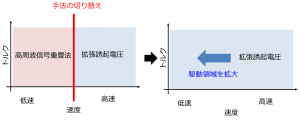
通常,拡張誘起電圧は回転速度に比例して発生することから中高速域に利用し,拡張誘起電圧が確保できない低速領域では高周波信号重畳法に切り替えて位置センサレス制御を行います。しかしながら,2つの手法が推定する位置というのは同一ではないため速度域で手法を切り替えることは切替時のショックを生むことになり,スムーズに切り替えることができない場合があります。速度に対して2つの手法を加重平均することで切り替えを行う手法もありますが,急加減速を要求されるアプリケーションでは加重平均を一気に通過していまい,脱調してしまう可能性もあります。
そこで文献[2]では上記の拡張誘起電圧は誘起電圧に加えて,突極性による誘起電圧(基本的に高周波信号を印加することで発生する成分)も利用できることから,永久磁石による誘起電圧が発生しにくい停止・低速域までスムーズに駆動領域を拡大できることが報告されています。
この回転速度に比例して発生する拡張誘起電圧を速度起因の拡張誘起電圧,停止・低速域に利用可能な信号重畳することで発生する拡張誘起電圧を信号重畳起因の拡張誘起電圧と定義しています。特に後者の信号重畳起因の拡張誘起電圧に関しては未だ積極的に研究されていませんでした。本研究では,信号重畳起因の拡張誘起電圧の特性を明らかにしつつ,この2つの特性を明らかにすることで,全速度域の位置センサレス制御性能の向上を目指しています。
本研究の着眼点②トルク
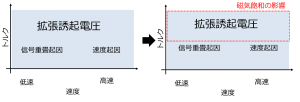
PMSMを使用するアプリケーションの拡大から更なる「小形化,高出力化」の要求が高まっています。そのため,磁気飽和領域を積極的に利用したモータ設計がされており,このようなモータを制御するには磁気飽和の影響を考慮する必要があります。
この磁気飽和現象によって,モータのパラメータのインダクタンスが大きく変動するため,位置センサレス制御性能が著しく劣化もしくは,不安定化します。そのため,磁気飽和に関する対策が積極的に研究されています。
本研究では,拡張誘起電圧モデルをはじめとする,位置センサレス制御用の数式モデルに着目して上記の問題に取り組んでいます。
本研究の取り組みまとめ
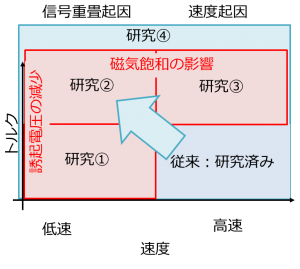
本研究では,上述の通り,全駆動領域の位置センサレス制御の実現を目指し研究をしています。
研究の取り組みは上に示す図の通りで,詳細は以下に示してあります。
①停止・低速域&軽負荷:信号重畳起因の拡張誘起電圧の特性とパラメータ誤差に対する対策例
- 近藤 翔太, 道木 慎二, 冨田 睦雄, “信号重畳起因の拡張誘起電圧を用いたPMSM 位置センサレス制御におけるパラメータ誤差に対するロバスト性の実機検証”, 平成29年電気学会産業応用部門大会講演論文集[III], 8, 2017.
- 近藤 翔太, 道木 慎二, 冨田 睦雄, “PMSM位置センサレス制御のための高周波重畳信号起因の拡張誘起電圧推定におけるパラメータ変動の影響 ”, 平成29年電気学会全国大会講演論文集, 3, 2017.
-
近藤 翔太, 道木 慎二, 冨田 睦雄, “PMSM位置センサレス制御のための高周波重畳信号起因の拡張誘起電圧推定におけるq軸インダクタンス変動に対するロバスト性”, 半導体電力変換/家電・民生/自動車・合同研究会, 12, 2016.
- S. Kondo, S. doki, M. tomita, “Mathmatical Models on Extended Electromotive Force Excited by High Frequency Signal Injection and Its Robustness for Position Estimation of PMSM”, IEEE PEDS 2017, 12, 2017.
- S. Kondo, S. doki, M. tomita, “A study on position sensorless control without any q-axis inductance by using Extended Electromotive Force with High frequency signal injection”, ECCE Europe EPE
②停止・低速域&重負荷:インダクタンス変動起因の拡張誘起電圧の存在とその対策
- 管 勃, 近藤 翔太, 道木 慎二, 古川 智康, 蓑島 紀元: “動作点によるインダクタンス変動が顕著なIPMSMにおける信号重畳法による位置推定性能の低下に関する検討 ”, 平成29年電気学会産業応用部門大会, 8, 2017.
③中・高速域&重負荷:q軸インダクタンス変動の影響にロバストな位置センサレス制御法
- 近藤 翔太,道木 慎二,冨田 睦雄, “PMSMの位置センサレス制御に向けたq軸インダクタンスを用いず推定可能な仮想的な磁束とd軸との位相関係の検討”, 平成30年電気学会全国大会 発表予定
④仮想誘起電圧表現に基づく永久磁石同期モータの位置センサレス制御用モデルに関する考察
- 近藤 翔太,道木 慎二,冨田 睦雄, “PMSM位置センサレス制御のための信号重畳起因の拡張誘起電圧とそのロバスト性に関する一考察”, 電気学会・モータドライブ/回転機/自動車・合同研究会資料 MD-17-073,RM-17-056,VT-17-010, 7, 2017.