研究テーマ / Research topic
二重三相固定子巻線を持つ巻線界磁型同期モータにおける位置センサレス制御領域の拡大
| English ver. | Japanese ver. |
To deal with the energy&environmental issue caused in the process of using fossil fuel, electric power system are introducd extensively and have taken the place of many fuel conbustion applications. Specifically, applications of electric motor drive system gains great progess in transportation field due to high-efficiency and low-pollution compared with conventional gasoline vehicle. Addition to predominant use in Electric Vehicle(EV), motor drive system are also adopted in ship propution, electric aricraft fields.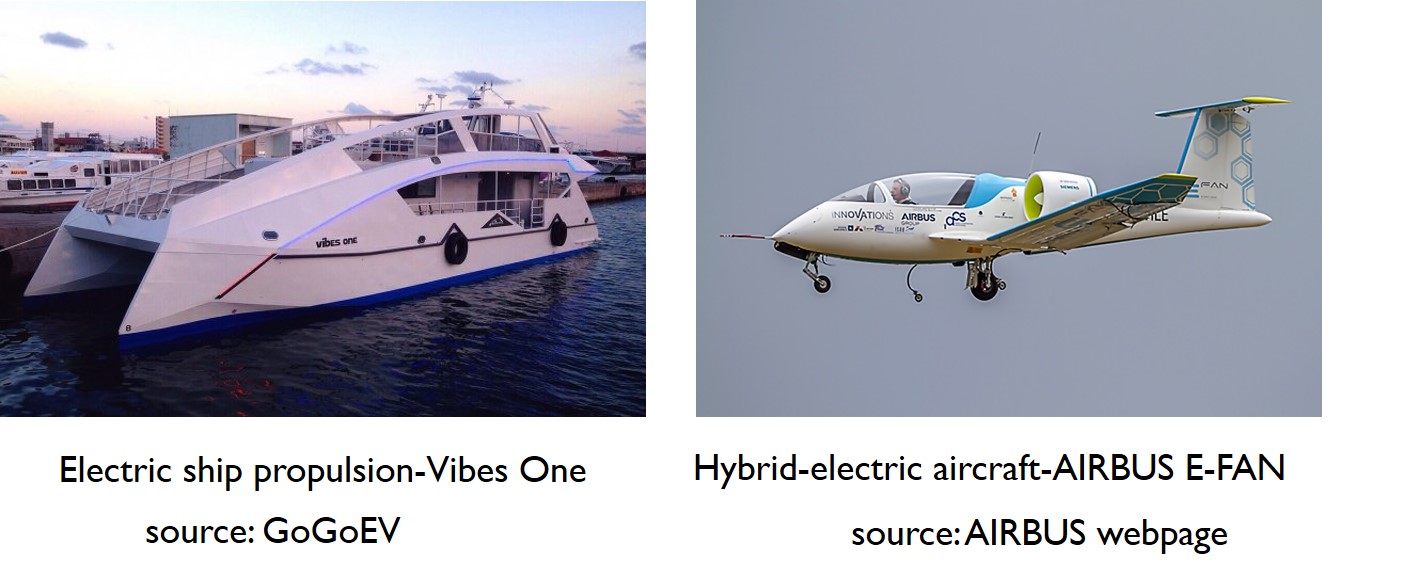
Safety is considered as a crucial factor in eletric application in the transportation field before. a Permanent Magnet Synchronous Motor(PMSM) is mostly adopted in motor drive applications dual to its structural simplicity as shown in the figure below and standarized manufacture process. However, once unexpected problem such as open circuit or short circuit happens in one or more phase winding of a PMSM, failture of the drive system working cannot be avoided due to its inherent poor fail-safe ability. However, fail-safe ability can be significantly improved by adding one more set of three-phase winding to the existed one sharing same structure of a PMSM, and in this way, a synchronous dual-three phase motor(dual-three phase motor) is obtained and shown beside the PMSM picture below.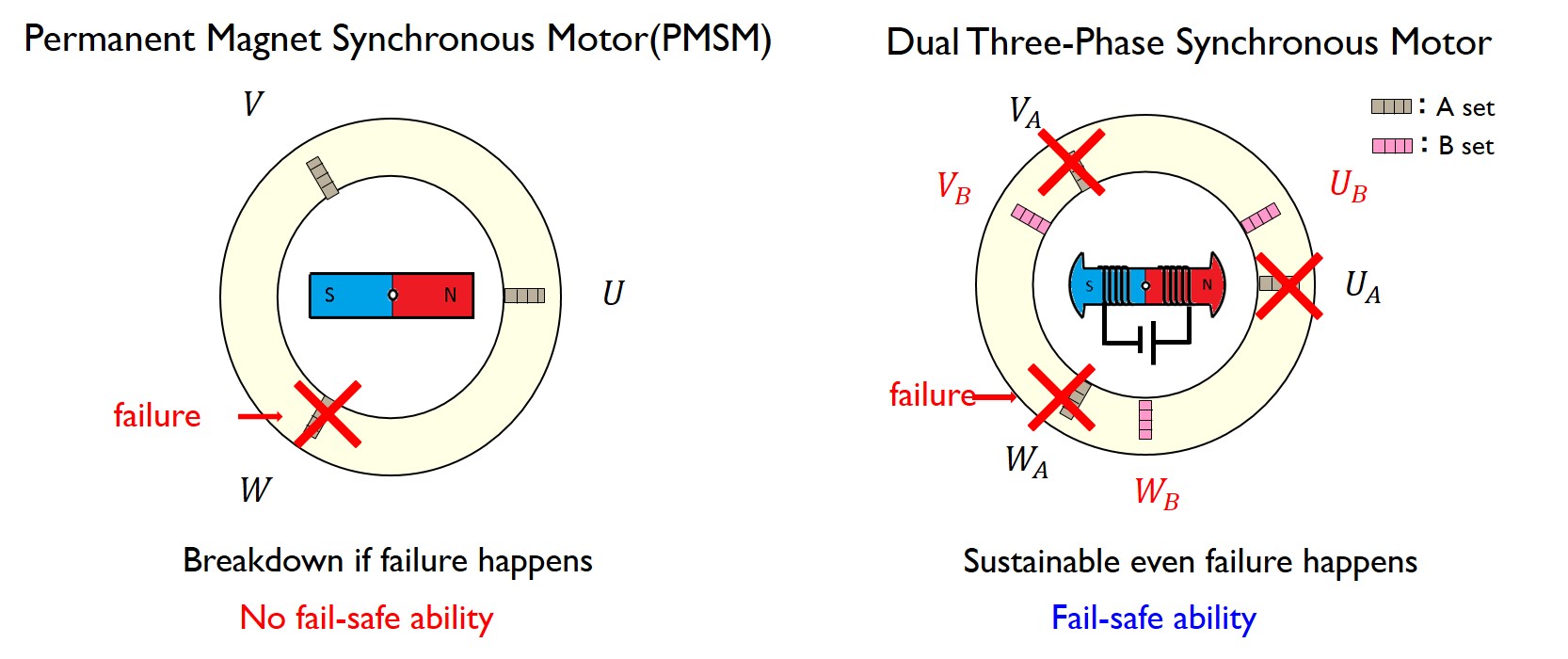
Redundancy of phase winding enables the dual-three phase motor good potential of fail-safe. Neverthless, as a result of complex phase windings, magnetic coupling exists between the two three-phase sets shown in the figure below. The coupling causes deterioration of torue response of a dual-three phase motor drive system as overshoot as well as delayed reponse dynamics can be confirmed from the figure next to the left one below. So it is necessary to establish a well-behaved dual three phase motor drive system regardless of coupling for extensive applications of this kind.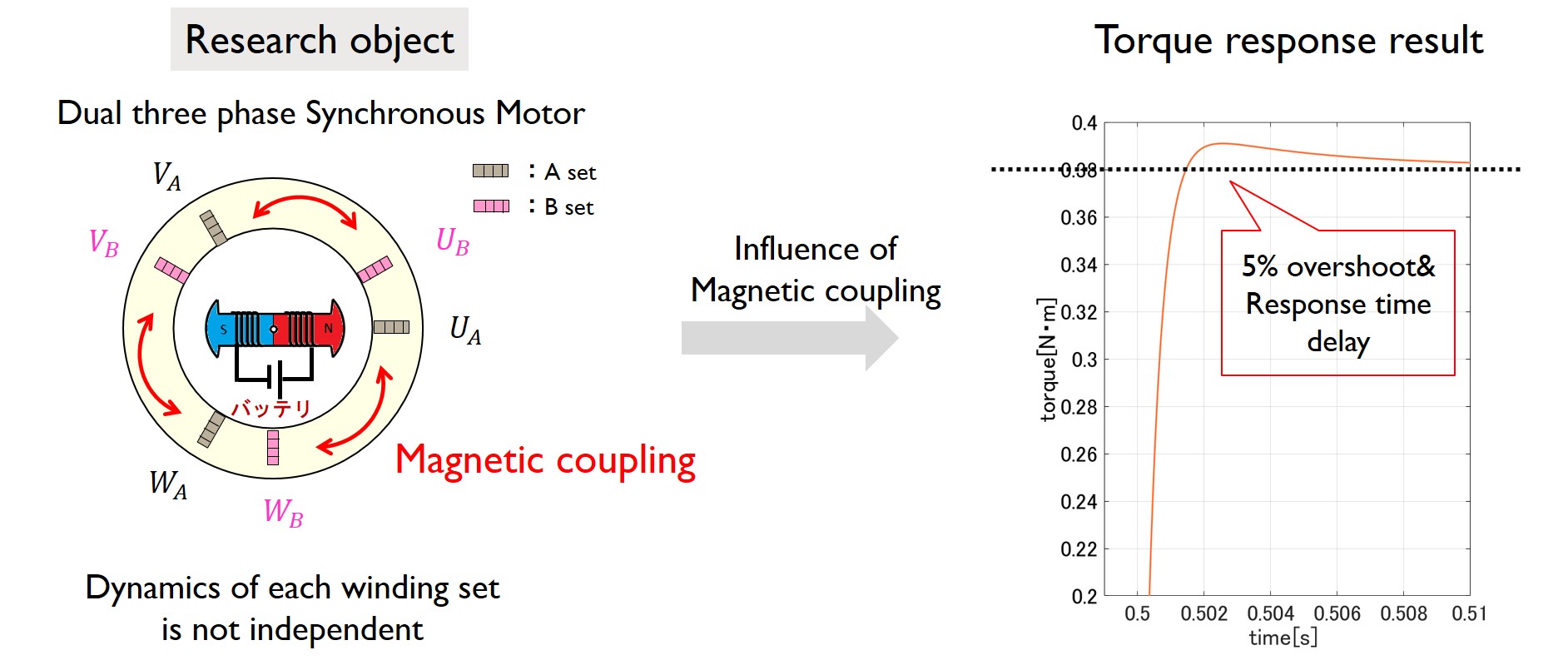
state feedback from control theory is adopted in this research to solve the coupling problem mentioned. Since the dynamics or characteristics of coupling can be described by a math model, we can estimate the coupling in every conrol period by the model. Then, we eliminate the influence of coupling by deploying another compensation cammand based on the calculation result of model, as shown in the figure below. In this way, coupling is cancelled out the compenstation and an indepentant control of both two subsystem can be achieved.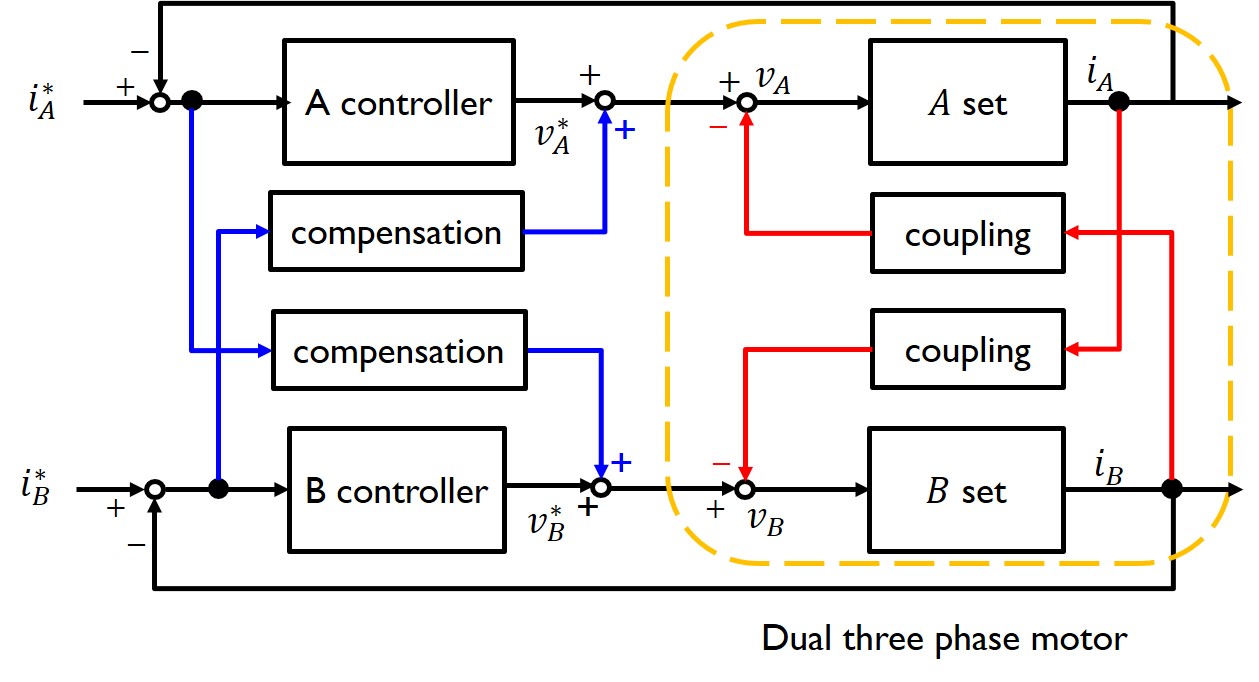
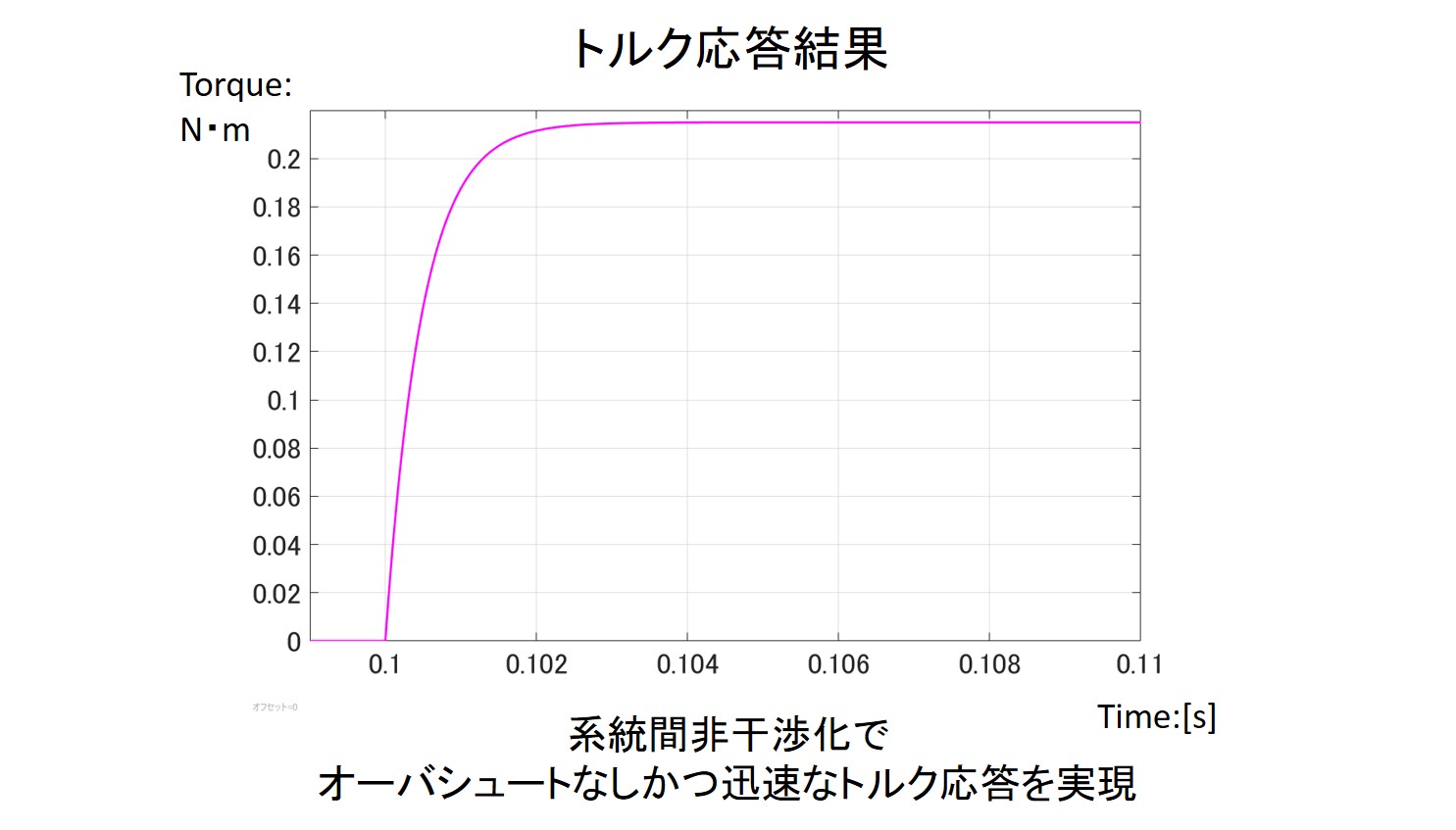
Simulation result shown below verified the effectiveness of the proposed method against coupling. As from the result, overshoot and delay in response no more appear comparing with the torque response result without proposed method.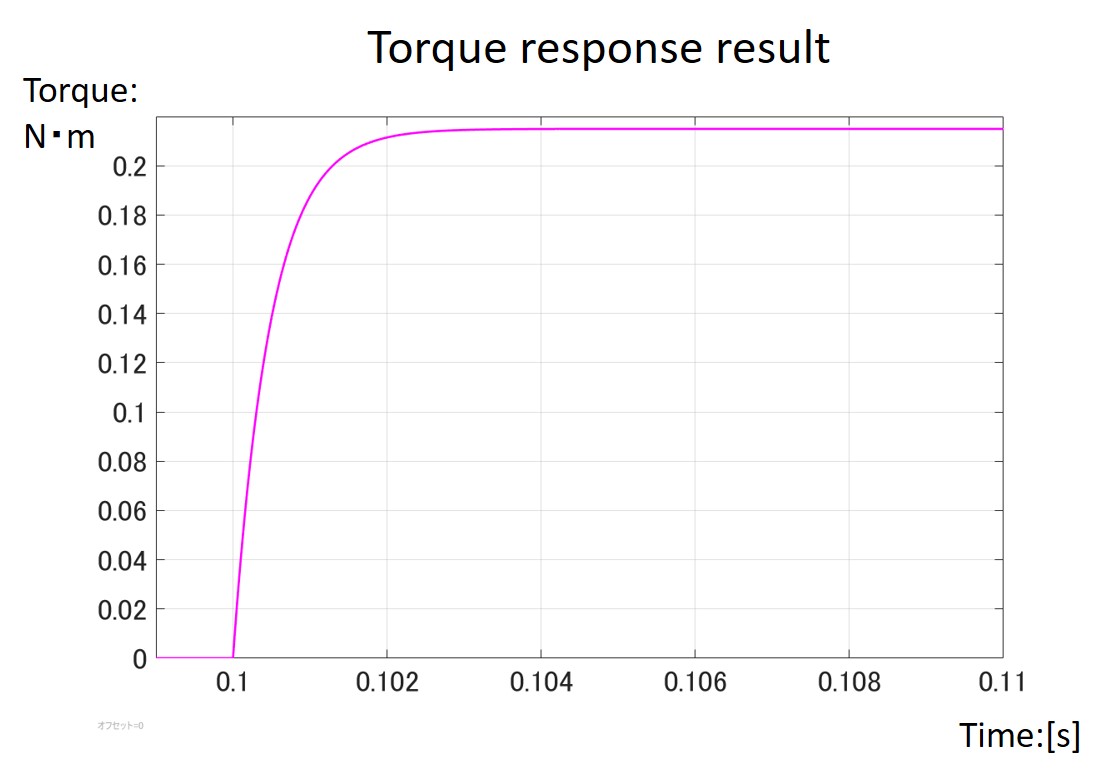
19E
ap
化石燃料の利用による環境・エネルギー問題の深刻化に対し、様々な分野の動力源の電動化が進められている。運輸部門においても、従来の内燃機関や油圧機関に変わる新しい動力源として、省エネルギーかつクーリンな特徴を有するモータ(電動機)の採用が進んでいる。電気自動車(EV)のみならず、下図に示すように、船舶推進、電気飛行機を含め、移動体分野至る所はモータドライブシステムの利用は急展開している。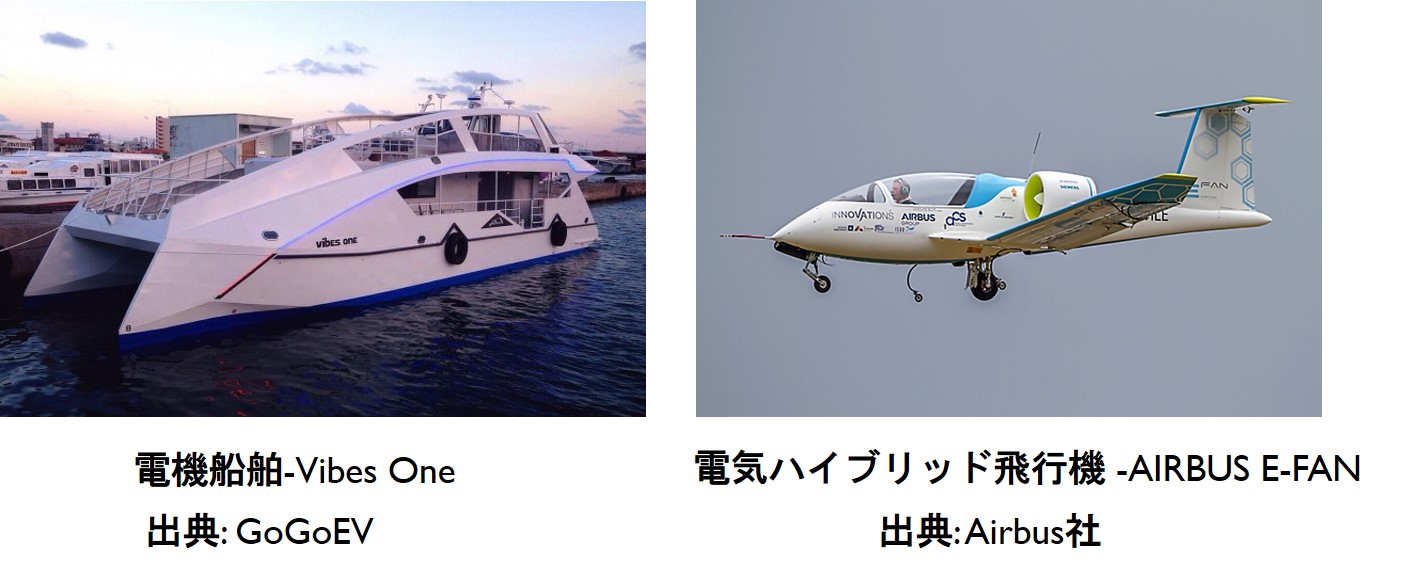
ところで、これら移動体分野においては機能安全は極めて重要な課題である。構造簡単や製造技術の標準化より、下図の左辺に示した3相固定子巻線を持つ永久磁石同期モータ(PMSM)は最も利用されている。一相分の巻線でオープン・短絡などの故障が発生する場合、PMSMドライブシステムは駆動不能になる。PMSMドライブシステムの弱いフェイルセーフ性は安全厳しく要求される移動体に適ではない。一方、同図の右辺に示すモータは二重固定子巻線同期モータ(二重巻線モータ)は従来のPMSMより高安全性を有し、移動体分野への利用が期待されている。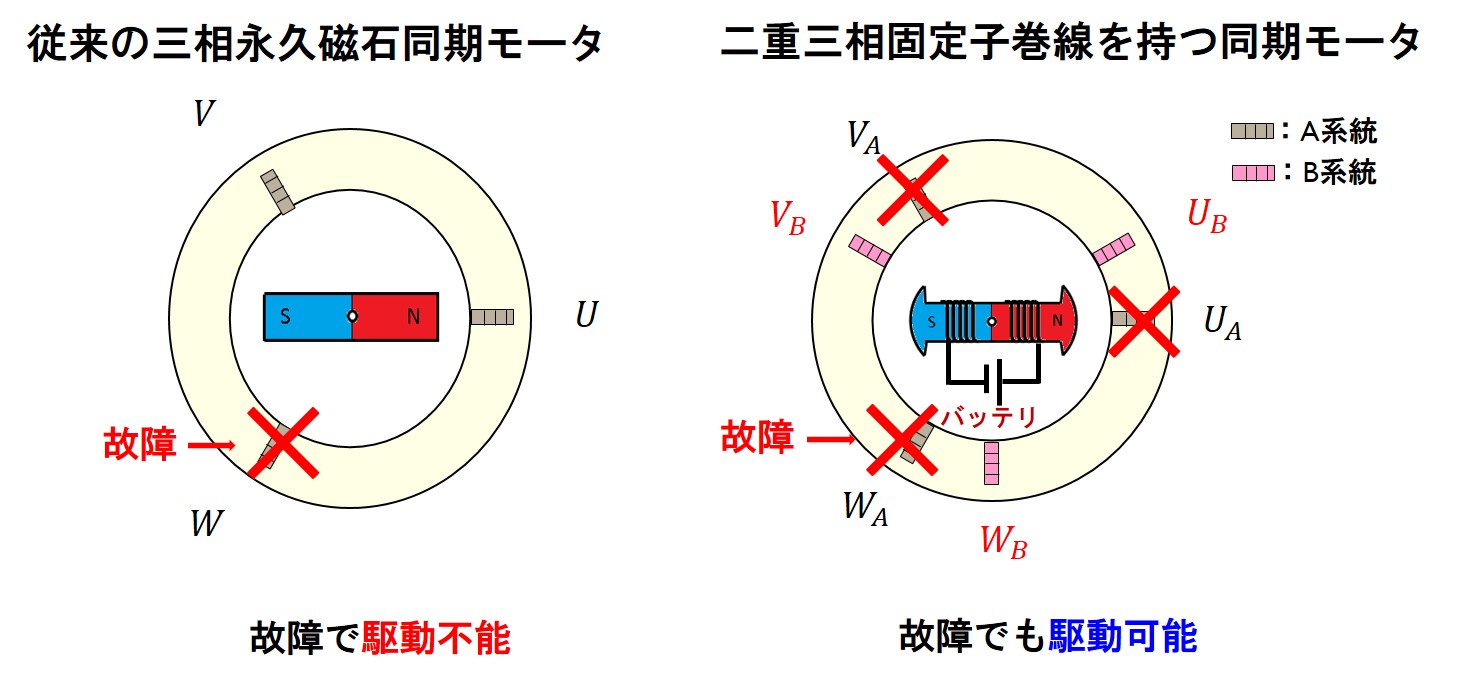
三相固定子巻線の冗長化構造有する二重巻線モータはフェイルセーフ化を実現できるものの、構造の複雑に伴う系統間干渉が発生する。片方巻線の電流変化は他方系統に影響を受ける。これは下図に示すように、系統間干渉はトルク応答にオーバシュートや応答速度の低下などの原因となり、二重巻線モータドライブシステムのトルク制御性能が劣化される。二重巻線モータの利用拡大には、こう言った系統間干渉問題を解決し、良好な制御性能を実現できる制御システムの検討は需要になってくる。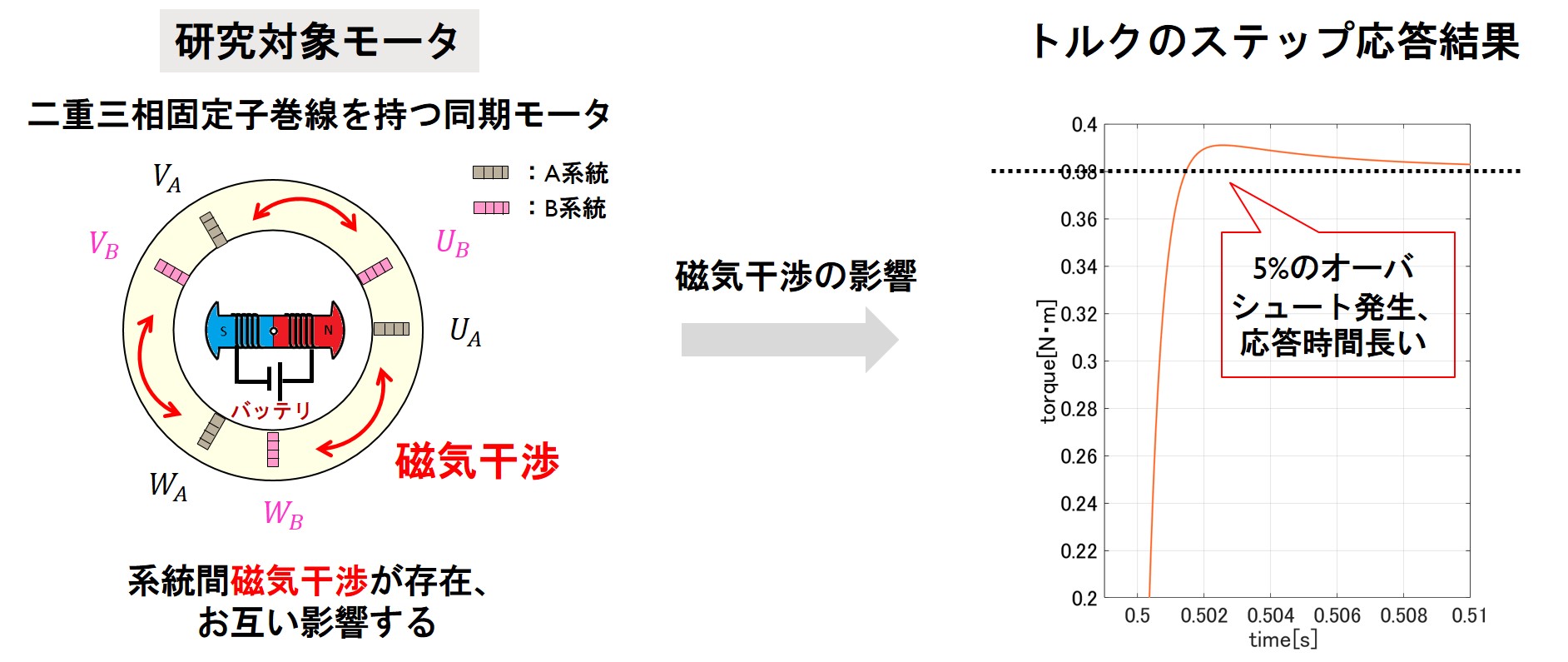
以下のような状態フィードバック技術を用いる非干渉化制御系を検討した。二重巻線モータの系統間相互インダクタンスを測定し、干渉の数式モデルを構築できた。そして、各制御周期で干渉をモデルで計算して制御器で補償を入れることで、二系統の入出力独立性を実現できた。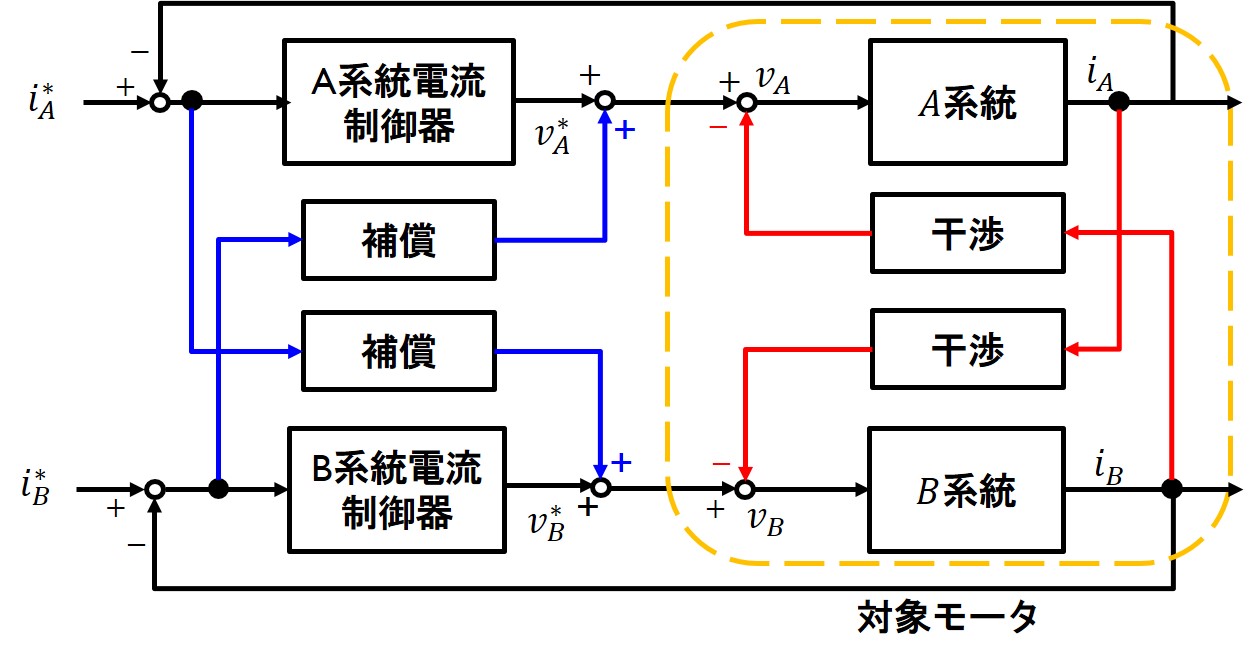
また、下図は非干渉化手法を適用時のトルク応答結果となる。この結果を上示した改善前のトルク応答結果を比べてみると、トルク応答は提案手法による大幅に改善されたことを確認でき、有効だと考える。