
- 名前:
- 安田 凜
- 学年/肩書:
- 博士課程前期課程1年
- 役職:
- 掃除当番
- グループ:
- ロボット
- 趣味:
- 筋トレ
- 一言:
- ロボットは…お好きですか?
研究テーマ / Research topic
面状プレートと細径人工筋を併用した着衣型アシストスーツの開発
a
研究背景
詳細はこちら
ヒトの身体に直接装着して動作を補助するアシストスーツが、農業・介護分野を中心に広く注目されている。現在、硬質なフレームで身体を覆う外骨格型のアシストスーツが一般的である。外骨格型スーツは外部からかかる負荷をフレームが引き受けてくれるため、高負荷な用途で安全に利用できるという利点がある。
一方、外骨格型スーツは、動作自由度の点で課題を抱える。一般的な外骨格型スーツは、ヒトの関節の動作に沿って可動する回転関節を有している。そのため、外骨格の関節数や自由度によって、身体関節の自由度は制限される。肩部や体幹部など多自由度の関節部に対し多自由度運動を補助する機構を搭載するためには、外骨格の関節を増加、複雑化させる必要があり、大型化・重量化といった問題を引き起こす。
本研究では、柔らかく駆動する細径人工筋を用いて、軽量・柔軟で衣服のように着用でき、多自由度動作をアシスト可能なアシストスーツを開発することを目的とし、スーツの動作機構についての研究を行っている。
提案する着衣型アシストスーツの構成
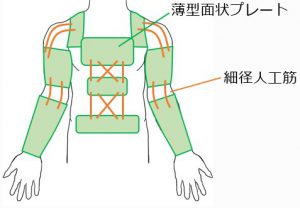
着衣型アシストスーツの構成イメージ
詳細はこちら
提案する着衣型アシストスーツの構成を上に示す。本スーツは素地に柔軟で伸縮性があり身体に密着する衣服を用いる。衣服上に硬質・薄型の面状プレートを貼付し、フレーム間を細径人工筋で接続する。人工筋を駆動することで収縮力によりプレートが可動し、体動作をアシストするといった駆動原理である。
プレートの貼付部位を関節動作を阻害しない位置に限定し、関節部には柔軟な細径人工筋のみを装着することにより、スーツは関節動作を阻害せず、無理なく多自由度アシストを実現できる可能性がある。また、体表に貼付したプレートは衣服や皮膚表面のように容易には変形しないため、外骨格型スーツのフレームのように、細径人工筋の発揮力を身体に効果的に伝達する効果を持つ。
人工筋とは
人工筋とは、まるでヒトの筋肉と同じような動作特性を持つアクチュエータのことである。本研究では、Mckibben型空気圧ゴム人工筋(以下Mckibben型人工筋と記述)という、空気圧によって駆動する人工筋を使用している。Mckibben型人工筋は、内部のチューブに空気圧を印加することで径方向に膨張し、軸方向に収縮する。Mckibben型人工筋は、重さに対して発揮する収縮力が非常に大きいという特徴が注目され、アシストスーツを含む様々なデバイスへの適用に向け研究が進められている。本研究では、Mckibben型人工筋の中でも細径なものを使用し、柔軟性を活かしてヒトの自由な動きに対するアシストの可能性を探求をしている。
薄型面状プレートとは

背面フレームを貼付した様子
薄型面状プレートは、炭素繊維複合材製で、3Dプリンターを用いて作製している。プレート形状は、ヒトが身体を動かした際の体表面形状データを基に、体表面を可動が大きい部位と小さい部位に分割し、可動が小さい部位のみを覆うように設計する[1]。体幹部に貼付したプレートは、体幹の可動域を狭めないことを確認している。
薄型面状プレートを衣服上に貼付した場合、衣服の形状変化を抑制し身体に対して密着することで、貼付しない場合と比較して駆動角度が向上することを確認している。
これまでの研究内容

肘屈曲駆動の様子

体幹伸展駆動の様子
詳細はこちら
単関節部位である肘関節の屈曲動作[3]、及び多数の関節が連結する体幹部の伸展・回旋動作[4]について、人工筋配向を決定し駆動実験を行った。身長170cm・体重40kgでヒトの関節の固さを模した人形(リアル介護練習人形「ゆるり君」, ヒューマンドール社)にスーツを装着し、駆動したときの駆動角度を評価した。
今後は、アシスト部位の拡大、及びより効果的にアシストが可能な人工筋配向やプレート形状の検討を行っていく予定である。
参考文献
[1]S. Honda, Y. Funabora, S. Doki, K. Doki, “Markerless Measurement System of Body Surface Deformation for Structure Determination of Wearable Robot”, 2019 IEEE/SICE International Symposium on System Integration, 1, 2019.
[2]深津 暖, 酒井 悠輔, 舟洞 佑記, 道木 慎二, “体表面に沿ったフレームを有するアシストスーツに向けたフレーム配置と可動域の調査”, 令和四年度 電気・電子・情報関係学会 東海支部連合大会 予稿集, 08, 2022.
[3]安田 凜, 舟洞 佑記, 道木 慎二, “体表に細径人工筋と面状フレームを配置した腕部アシストスーツの試作”, Robomech2023 予稿集, 6, 2023.
[4]安田 凜, 舟洞 佑記, 道木 慎二, “体幹の複雑な運動をアシストする着衣型アシストスーツの試作”, 計測自動制御学会システムインテグレーション部門講演会予稿集, 12, 2023.
[5]カタログ | ヒューマンドール 株式会社