研究テーマ / Research topic
センサレス制御技術による永久磁石同期モータのフェールセーフ化
Fail-Safe of PMSM by Utilizing Sensorless Control Method
PMSMの用途拡大と安全性– Diversification of use of PMSM and Safety |

永久磁石同期モータ(PMSM)は、小形・高出力、高効率など様々な特徴を持っていることから、従来より家電民生・産業用ロボットなど幅広い分野で用いられてきました。近年では更なる用途の拡大・高度化が進んでおり、自動車や航空機をはじめとした移動体分野においても活用されるようになってきています。
PMSMの用途の高度化に伴い、高い安全性・耐故障性が求められる機会は増えつつあります。万一故障が発生してしまった場合にシステムが安全に動作することは、安全性を保証するために重要な役割を果たします。
PMSM has been used in various fields such as home appliances and industrial robots because of its high efficiency and high power per volume and weight. In recent years, the use and promotion of PMSM applications are progressing, and it is also being used in the mobile field such as automobiles and aircraft.
Along with diversification of applications, opportunities that require High Safety and Fault Tolerance are increasing. It plays an important role to ensure safety that the system operates safely when a failure occurs.
センサレス制御技術によるセンサ系の冗長化– Redundant Sensor System with Sensorless Control Method |
PMSMを駆動するにあたって想定される故障のひとつに、電流センサ・(磁極) 位置センサといったモータを駆動・制御するためには欠かせない「センサ」の故障があります。PMSMを駆動するためには、PMSMのほかに「制御器」「インバータ」「センサ」が必要であり、かつこれら全てが正常である必要があります。そのため通常のシステムでは、センサが一つでも故障したらPMSMを駆動できなくなってしまうといった問題があります。
この問題を解決するためには、センサ系の冗長化が有効です。冗長化することによって、一つセンサが故障しても補間することができ、システムの耐故障性を向上させることが可能となります。
One of the concern in driving PMSM is the Failure of Sensor. It is necessary to use Controller and Inverter, and Sensor when driving or controlling the PMSM, and all of these must be normal. Therefore, there is a problem in the normal system that PMSM is not able to be driven if even one sensor fails.
The method to solve this problem is to make sensor system REDUNDANCY. By making it redundant, it can be Interpolated even one sensor fails. It improves the fault tolerance of the system.
センサの冗長化手法1
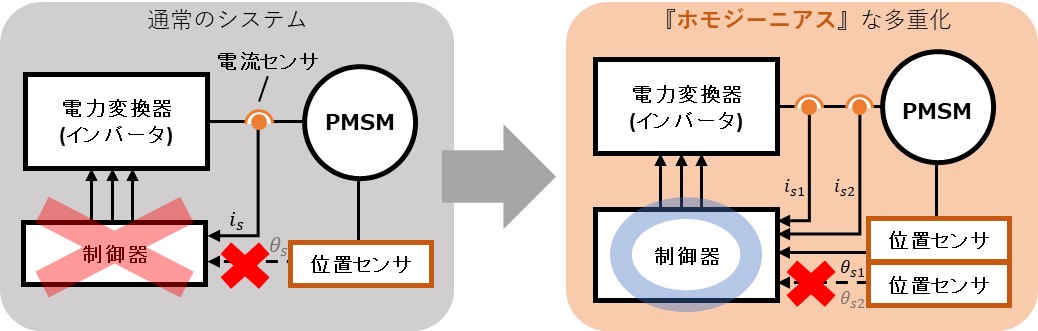
一般的なセンサの冗長化手法としては、「ホモジーニアスな多重化手法」が挙げられます。この手法は「同一センサ」を複数用いることによる多重化手法です。上の図のように一つセンサが故障してももう片方のセンサで補うことができるため、もっとも単純にシステムの耐故障性を向上させることができます。しかし、従来と比較して過剰にセンサを用いる必要があるため、コストの増加やシステムの大型化など問題点も生じます。
Redundancy method 1
General sensor redundancy method is “HOMOGENEOUS Multiplexing Method”. It uses Same Sensors for multiplexing. It is the simplest way to make sensor system safety because it is able to use another same sensor if even the sensor fails. However, since it is necessary to use multiple sensors, there are problems such as cost increase and system upsizing.
センサの冗長化手法2
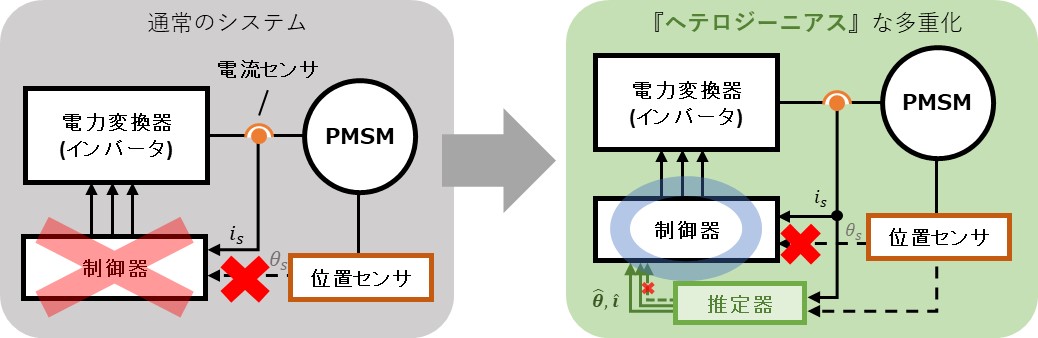
もう一つの方法として、「ヘテロジーニアスな多重化手法」が考えられます。この手法は、センサではなく「センサレス制御技術」を用い仮想的に多重化する手法です。センサが故障しても推定器によって値を補間可能なため、耐故障性向上が期待できます。この手法は、先程の手法と異なりセンサを過剰に用いる必要がないため、ハードウェアを変更せずに多重化が可能です。また、年々向上する計算機の能力をフルに活用できるといったメリットもあります。
幸いなことに、モータの分野では、センサレス制御技術自体はすでに成熟した技術となりつつあります。しかし、この技術はこれまで更なる小形低コスト化のために「センサを廃止」する目的で活用されることがほとんどでした。我々は、この既存のセンサレス制御技術を「センサと組み合わせる」ことによって、新たに耐故障性向上を目的として活用することを試みます。
Redundancy method 2
Another sensor redundancy method is “HETEROGENEOUS Multiplexing Method”. It uses Sensorless Control Method instead of Same Sensor for multiplexing. It is also way to make sensor system safety because it is able to use the Estimated Value if even the sensor fails. It is NOT necessary to use multiple sensors, so it is possible to be multiplexing without changing the Hardware. There is also a merit that you can use the ability of computer to improve every year.
Fortunately, in the field of motors, Sensorless Control Method itself is already becoming mature technology. However, it has been used for the purpose of “Removing Sensors” mostly. We will try to utilize this Sensorless Control Method in “Combination with Sensors” for the purpose of “Improving Fault Tolerance”.
シミュレーションによる検証– Verification by Simulation |
センサとセンサレス制御技術を組み合わせた多重化手法によるモータ駆動システムのフェールセーフ化の可能性について、シミュレーションによる検証を行いました。
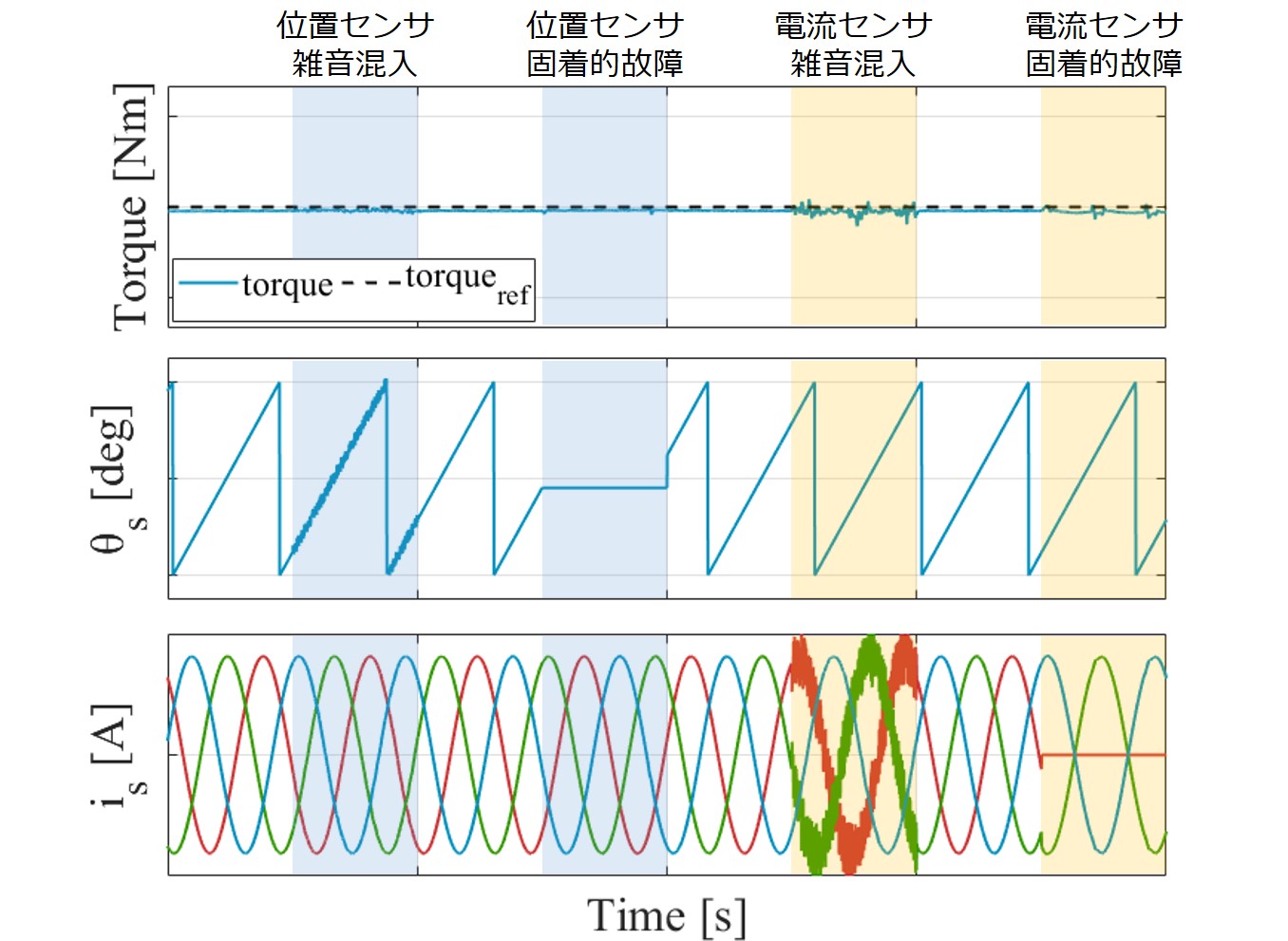
図は、一番上がトルク制御結果、真ん中と下がそれぞれ位置センサ・電流センサの値を表しています。青色のところで位置センサに故障が生じており、黄色のところで電流センサに故障が生じています。結果より、故障が生じた場合においてもトルク制御結果は指令値に追従しており、所望の制御ができていることが分かります。よって、本システムがセンサ故障時においてもフェールセーフな駆動が可能であることを確認できました。
今後は様々な動作環境での検証・実機検証を行う予定です。
We verified the possibility of Fail-Safe Motor drive system by Multiplexing Method Combining Sensor and Sensorless Control Method by Simulation. This figure shows the results. It shows Torque control result, Position sensor value, Current sensor value from the top. A fault occurs in the position sensor at blue, and occurs in the current sensor at yellow. As the result, we can see the torque control result follows the command value even if a failure occurred. Therefore, we confirmed that this system is capable of Fail-Safe driving even when the Sensor Fails.
本研究は科研費(17H03216) の助成を受けたものです。
This work was supported by JSPS KAKENHI Grant Number 17H03216.