研究テーマ / Research topic
布状アクチュエータの制御
| English ver. | Japanese ver. |
Research background and purpose
Soft actuator

a walking training device using pneumatic rubber artificial muscle in Bridgestone[1]
A soft actuator is an actuator made of lightweight and flexible material. Many kinds of soft actuators have researched and developed especially for applications with human wearable devices, human coexistence robots and so on. The left image is a walking training device using pneumatic rubber artificial muscle in Bridgestone.
The video below shows a pneumatic small diameter artificial muscle. This artificial muscle contracts by apply air pressure.
Fabric actuator
fabric actuator
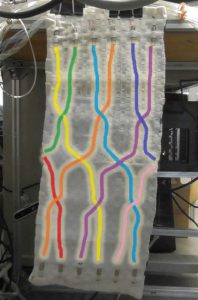
The movements of almost soft actuators are designed in one dimension, that is, an actuator can move in one degree of freedom. On the other hand, fabric actuator can be deformed with multiple degrees of freedom such as bending, side bending, and twisting. This actuator is composed of 12 extra thin pneumatic artificial muscles(purchased from s-muscle Co., Ltd) arranged on a flexible rubber textile made by woven flat rubber threads. The left image is a fabric actuator. The colored lines are artificial muscles. The fabric actuator is deformed by applying air pressure to each artificial muscle arranged.
The below movie is an actual deformation of the fabric actuator. The three patterns, bending, side bending and twisting, are realized.
However, these air pressure patterns are designed heuristically, and the fabric actuator can not be controlled to the desired deformation. So, in this research, we are researching for control of fabric actuator.
Research content
model of the control system
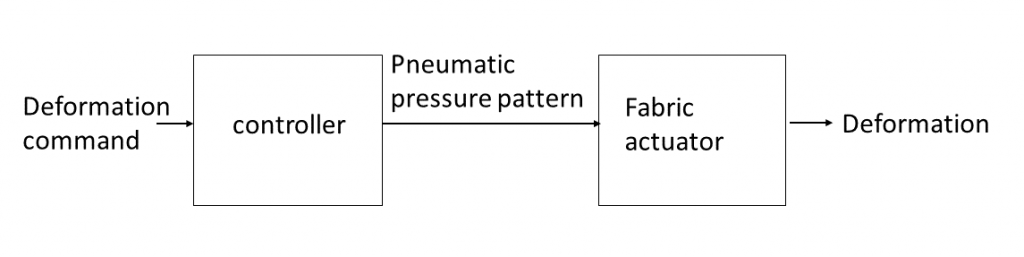
In order to control the fabric actuator, a control system is needed. The above figure is a simple model of the control system. When a deformation state is an input as a command, it is converted to air pressure by the conversion model and air pressure is applied to the fabric actuator. In this way, the fabric actuator realizes the desired deformation.
1.Expression way of deformation state
2.Construct of conversion model
3.Evaluation of the control system
The evaluation of the control system has been completed. The video below shows an experiment of the control system. The left side of the video shows the command, and the right side shows the result of control by the control system. The desired deformation is roughly realized, but the error is still large. Currently, we are aiming to construct a control system that can deform more accurately.
Source
[1]Car Watch「ブリヂストン、空気圧式ゴム人工筋肉を活用した歩行トレーニング装置の試作機公開」 https://car.watch.impress.co.jp/docs/news/1097043.html
研究背景と目的
ソフトアクチュエータとは
空気圧式ゴム人工筋肉を利用した歩行トレーニング装置[1]
下の動画は空気圧式細径人工筋です.この人工筋は空気圧を印加することで収縮するものです.
布状アクチュエータ
布状アクチュエータ
既存のソフトアクチュエータの多くは伸縮のみ、曲げのみといった一自由度の変形を実現するものでした.一方,開発した布状アクチュエータは屈曲,側屈,回旋といった多自由度の変形が可能です.
布状アクチュエータは平ゴムを編んで布状にしたものをベースとし,その両面にMcKibben型細径人工筋肉を六本ずつ編み込んだ構成となります.左図は布状ソフトアクチュエータです.わかりやすいように編み込まれた人工筋肉を画像上で着色してあります.このように配置されたそれぞれの人工筋に空気圧を印加させることで布状アクチュエータは変形します.
下の動画では布状アクチュエータを変形させた様子です.屈曲,側屈,回旋の三パターンの変形をさせています.
しかし,これらの変形を実現する空気圧パターンは実験を通して試行錯誤的に求めたものとなっており,布状アクチュエータを所望の変形に制御することができていません.そこで本研究では布状アクチュエータの制御を目的として研究しています.
研究内容
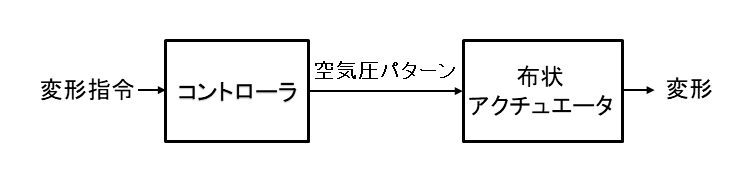
布型アクチュエータを制御するためには制御系の構築が必要です.上図は簡単な制御系のモデルです.変形指令として変形状態を入力すると変換モデルで空気圧へ変換され,布状アクチュエータに空気圧が印加されます.それにより,指令通りの変形を行います.
制御系を構築するためには次の3点が必要と考えています.
1.変形状態の表現法
2.変換モデルの作成
3.制御系全体の評価
現在は3.制御系全体の評価まで終了しています。下の動画は構築した制御系の実験の様子となっています.動画の左側は指令値とした変形,右側は構築した制御系での制御の結果です.大まかには所望の変形ができていますがまだまだ誤差は大きいです.現在はより正確に変形させることができる制御系の構築を目指しています.
出典一覧
[1]Car Watch「ブリヂストン、空気圧式ゴム人工筋肉を活用した歩行トレーニング装置の試作機公開」
https://car.watch.impress.co.jp/docs/news/1097043.html